



























TECHNICAL SUPPORT

发布时间: 2026-02-21
很多朋友接触机器人、智能小车,或者各种自动化小玩意儿的时候看见过这个“小家伙”舵机。让它动起来容易,接上电源和信号线就行。但要说清它为啥能精准转到指定角度,很多人为此挠头。网上资料要么太碎片舵机厂家伟创动力,要么太深奥,有一堆看不懂的波形图和专业术语,让人越看越糊涂。
特制这份从原理直至实战的,有着图解视频讲解的教程全集,目的在于帮你完全弄明白舵机驱动那边的“秘密”,不论你是才刚开始入门的新手,还是有着产品创新需求,正处在选型时期的设计师,这套教程理应可以帮你排除阻碍,让你的项目运行得更为智能。
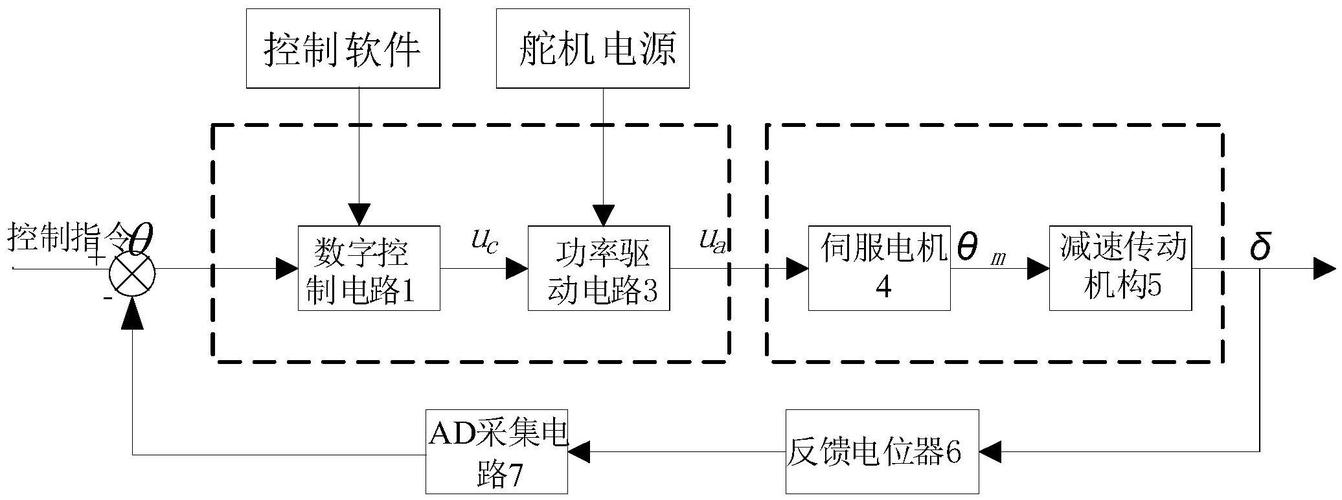
简短来讲,舵机乃是一个“顺从”的伺服系统 ,它如同一名勤勉的职员 ;你告知它(发送一个控制信号)需转动至什么方位 ,它便会奋力且精准地抵达那个方位并维持住。与我们平常所见到的普通直流电机有所不同 ,普通电机仅仅会持续地转动 ,而舵机着重的是“转动到何处”。它主要是由一个直流电机 、一组减速齿轮 、一个位置反馈电位计(也就是一个可变电阻)以及控制电路板所构成。这几个部件协同运作 ,就形成了一个闭环控制系统 ,确保指令与实际位置相契合。
驱动舵机进行转动,实际上是给予其一个特定的“指令”,此指令借助一根信号线来进行传输,其本质是一个周期幅度为20毫秒(ms)的脉冲信号,该脉冲的宽度,即高电平延续的时长伟创动力,决定了舵机所要转动抵达的角度,标准舵机一般接纳0.5ms 至2.5ms 之间区间的脉冲,这两个数值分别对应 90°到 +90°的转角幅度,例如,1.5ms 的脉冲宽度,通常会使得舵机停歇在中间位置。所以,你只要借助你的主控板,像是或者STM32,精准地创造出不同宽度的脉冲波,便能够轻易地指挥舵机转动到任何你期望的角度了。
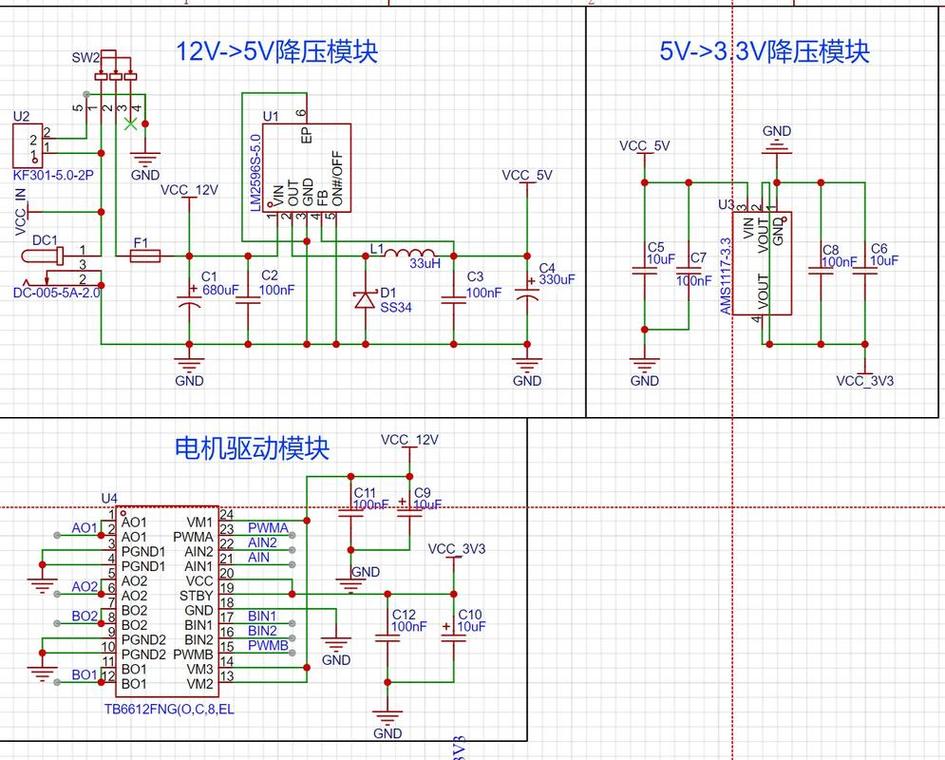
选驱动芯片,重点得瞧你的“老板”是啥人。这儿所说的老板便是你的主控制器。要是你的主控属于这类,直接借助它的库函数便可生成控制脉冲,用不着额外的驱动芯片。然而要是想同时操控多个舵机,又或者舵机功率挺大,那就得思量专门的舵机驱动板了。挑选驱动芯片或者驱动板之际,关键要看这三点:通道数(能够带动几个舵机)、电压和电流(能不能带动您的舵机)以及通信接口(是I2C还是串口,便于和主控“交流”)。先是列好你那舵机的型号以及数量,而后再去挑选驱动板,这般做最为稳妥。
接线看上去好像挺容易,然而哪怕是一个极小的失误,都极可能致使舵机无法正常运转,甚至会将芯片烧毁。标准的舵机接口一般会有三根线,电源线称作VCC,通常颜色为红色。地线是GND,呈现棕色或者黑色。还有信号线是PWM,颜色为黄色或者橙色。和驱动芯片相连的时候 ,得把舵机的电源线以及地线,接到驱动板对应的电源端子之上。至于信号线,则要连接到驱动板标有PWM或者SIG的引脚上。⛔特别留意:要是舵机功率偏大,切不可将其电源径直连接至主控板的5V引脚上,要额外连接独立电源,不然极易烧坏主控板!
我们的视频教程将用动画拆解舵机内部工作流程,目的在于让你能更直观地予以理解。当你借助主控板发出一个宽度为1ms的脉冲时,你能够清晰看见此信号进入控制电路板的具体情形。控制IC会马上针对这个指令信号与电位计反馈回来的当前角度信号展开比较。要是两者并不一致,那么IC就会驱使电机进行转动。电机借助减速齿轮,带动输出轴以及电位计一同转动,一直到电位计反馈的角度信号与你发出的指令信号完全等同,电机才会停止运转。整个过程一气呵成,这就是舵机精准定位的秘密。
在视频教程当中,我们不但会去讲解原理,而且会手把手带着你去实战控制方法。我们会选用最常见的这种平台来做示范,教你怎样运用几行简单的代码,使得舵机达成从0°至180°的来回扫描。你将会学到怎样对舵机对象进行初始化、怎样运用write()函数去指定角度,以及怎样借助延时来控制转动速度。更关键的是,是我们将会去演示怎么样凭借修改代码,使得舵机去执行更为复杂的动作序列,就像是模仿机器人手臂的抬起动作以及放下动作,从而让你真真切切地掌握舵机控制的核心技巧。
观览完这些内容之后,你是不是针对舵机驱动已拥有更为明晰的认知了?于你的项目之中,最打算试用舵机去达成怎样有意思的功能?欢迎于评论区域留言以分享你的想法,令我们共同撞击出创意的火花!要是觉得这篇文章有实用价值的话舵机品牌伟创动力,可别忘了点赞并且分享给更多有需求的友人呢~。























