



























TECHNICAL SUPPORT

发布时间: 2026-03-26
在日常之中,你是否遭遇过这般状况呢:所购得的舵机其质量诚然良好,然而一旦接入至项目之内,于进行控制之时便会显得手忙脚乱,要不就是线路数量过多而难以理清,要不就是下达一条指令之后,多个舵机一同毫无秩序地乱动呢?莫要着急,此种情况极有可能并非舵机自身的问题,而是你对于“总线舵机指令”尚未足够熟悉。于今日,咱们就来谈论这个令诸多产品开发者既有喜爱又心怀忌惮的话题,助力你将这套“指挥系统”熟练运用得当呢。
粗略来讲,它仿若一套“通用语言”而已。过去咱们借助 PWM 信号操控舵机,一个舵机便需占用一根信号线,要是打造一个六轴机器人,单单接线就足以令人头疼不已。而总线舵机指令,准许你运用一根数据线,与此同时连接几十个舵机,接着经由各异的 ID 编号,单独去指挥其中的任意一个。你能够将其设想成一个班级,老师(主控器)讲“第二排的同学举起右手”,指令传播至全班,然而唯有被点到名的那个同学才会执行。如此这般,你的整个控制系统会变得极为简洁、高效。
通常借助串口(UART)或者 CAN 总线来将此类指令进行传输。兴许对于你而言,“串口”听起来好像略微带点技术方面的感觉,然而实际上它便是我们电脑上较为常见的 COM 口,仅仅凭借 TX(发送)还有 RX(接收)这样的两根线就能顺利达成双向通信。这所表明的是由此你不但能够给舵机发送指令,同时还能在任意时刻去读取它的诸如位置、温度、电流等之类的状态,进而达成真正意义上的闭环控制。当你所研发的智能机器人有需要精准地感知每一个关节状态的时候,你便会知晓这究竟有着多么重要。
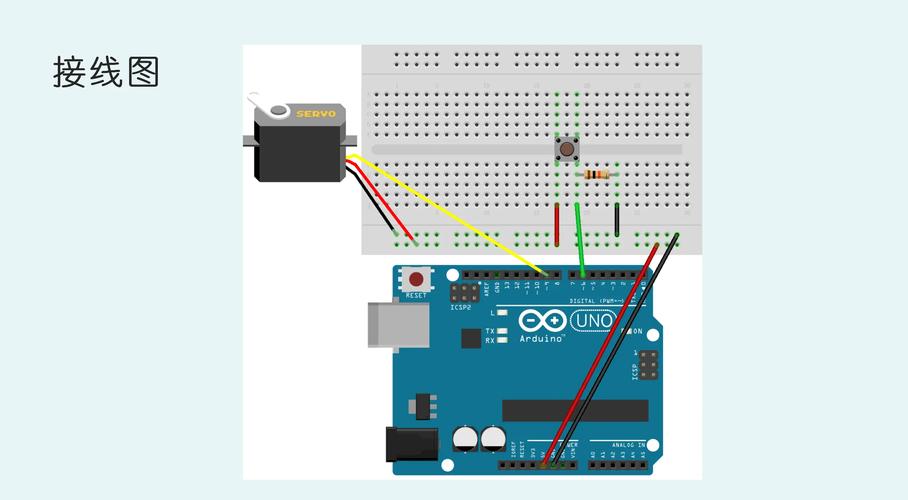
说它上手比你所想象的要来得简单,,你要去确认你的主控板,像是、STM32这类的,和舵机是支持同一种总线协议的,常见的有TTL、RS485或者CAN。以TTL为例,你只需将舵机的两根数据线,通常是黄色和绿色的,分别连接到主控的TX和RX引脚上,再连接上电源以及地线,硬件部分就算完成了。相较于传统舵机那如同“一团乱麻”的接线,这种方式简直就是如同“治愈强迫症”一般的存在。
紧接着要做的事情便是编写代码了,你并不需要从最开始去创造全新的东西舵机厂家伟创动力,舵机生产厂家通常情况下都会给出已然现成的库文件或者指令示例,关键的部分其实就是数目有限的几条指令:进行ID的设置,对目标角度展开设置,读取当前的状态,比如说你期望让ID是1的舵机转动到90度的情形下,发送一串相对简单的十六进制指令“55 55 01 02 5A 5A”便可以达成目的,这一套指令之中蕴含着帧头、ID号、数据长度、指令类型以及数据内容,就如同寄送快递时填写的地址以及所包含的具体内容那般清晰明了,你仅仅需要把这些指令组合封装成为一个函数,往后调用起来的时候就会显得极为便利了。
具备的最为突出的益处便是“化繁为简”,假定你正着手打造一款拥有16个自由度的桌面机械臂,要是采用传统舵机,仅仅信号线就需要处理16对,若再算上电源线,整个线束竟比手臂自身都要粗,在调试的时候,哪怕拆解一根线都会让人内心充满恐惧。一旦使用总线舵机,所有信号都经由一根线来传输,整个系统瞬间就变得简洁明了,外观看上去也更像是成熟的产品样式。更为关键的是,在调试阶段,你能够随时读取任意一个舵机的反馈情况,诸如它是否出现卡住的状况、温度是否处于过高状态,这为产品的稳定性以及安全性给予了两重保障。
“状态反馈”是又一个极为巨大的优势,传统舵机仅能发出指令,其是否到达指定位置,完全依赖肉眼观测,总线舵机指令却准许你实时向舵机进行询问:“你此刻处于什么位置?温度是多少?负载电流有多大?”这对于诸如双足机器人行走、多轴无人机云台等需要精准同步的应用而言是万分关键的,设想一下,当你的机器人由于某个关节负载过重而即将出现故障时,主控能够预先感知并即刻调整姿态,此功能对于产品创新来讲,价值是难以估量的。
市面上存在各式各样的总线舵机,面对这些别挑得让眼睛花掉。第一步,查看你的主控板能支持何种总线。要是你的主控板原生支持CAN总线,那么选择CAN舵机便可省去一个转换模块;倘若使用的是常见的STM32或者 Mega,TTL或RS485总线舵机通常会更为简单易用。你能够先从厂家所提供的资料着手,瞧瞧他们的指令集是否清晰,有无现成的驱动库,这能够大幅降低你的开发周期。
处于第二步时,要去查看舵机的物理参数,这跟挑选传统舵机相较而言没什么不一样的地方,具体涵盖扭矩、速度、精度以及工作电压这些方面。然而总线舵机存在一个优势,那便是能够进行串联供电,从而使电源布线得以简化。你得去计算一下所有舵机同时运行之际的总峰值电流,以此来保证你的电源具备足够强大的能力。另外,要是你所做的是防水或者户外设备,那么可以去关注诸如IP67等级的总线舵机;要是要求运行环境极其安静,一些运用FOC控制的总线舵机则会更加适宜。
实话说与你知晓,丝毫不存在困难。绝大多数总线舵机之内的协议皆遵循一种简易框架,此框架为:帧头加上ID加上数据长度加上指令加上参数加上校验。这恰似写信之时的格式那般,有着固定的模式。你并不必定要成为通信领域的专家,只需依据厂家所给出的协议文档,将你欲要设定的角度、ID等相关信息填充至指定的位置,接着借助串口发送出去便达成了。诸多厂家还会提供具备图形化的上位机软件,连代码都无需编写,仅仅在电脑之上点击鼠标,便可操控舵机进行转动,极为直观。
如果你乐意耗费半小时,将厂家所提供的示例代码完整运行一遍,基本上便能够摸透其中的门道。一旦你领会了“发送指令 读取反馈”这个封闭的循环,你就会发觉自身一下子掌握了操控多个舵机的关键能力。并且,鉴于总线舵机指令往往极为标准,你在某一家学会之后,去切换至另一家的多数产品时,同样能够迅速上手伟创动力,这种知识的可迁移特性是格外宝贵的。
产品创新常常并非是从无到有创造出某个从未见过的事物,而是将现有的技术运用得更为巧妙,其中总线舵机具备“串联”特性,这为模块化设计开启了通道舵机品牌伟创动力,比如说你若要制作一款模块化的蛇形机器人,每个关节都是一个自带总线舵机的单独模块,只需把模块如同串糖葫芦那般串联起来,接上电源以及总线,在软件层面便能够识别出整个串联结构,此举大为简化了机械结构以及装配流程,使得快速迭代以及定制化生产成为可行之事。
此外,由总线舵机指令所带来的状态反馈,乃是构建智能产品关键的基础所在。举例而言,有一款智能的电动窗帘杆,它可以依据指令进行开合操作,而且能够借助电流反馈来检测是否存在异物卡住的情况,进而实现自动停止或者报警的功能。又比如说,有一架农业喷洒无人机,借助总线舵机把控喷头的角度,并实时反馈每个喷头的状态,以此确保农药喷洒均匀且没有遗漏的现象发生。这些看起来微不足道的改进,却能够最大限度提升用户的体验以及产品的可靠性,从而让你在竞争激烈的市场当中崭露头角。
你在开展产品创造新事物工作时,碰到过由于掌控繁杂进而舍弃某些有意思功能的过往经历吗,欢迎于评论区域交流你的看法,要是认为这篇文章对你存在助益,也千万别忘记点个称赞并且分享给身旁拥有的友人!























