



























TECHNICAL SUPPORT

发布时间: 2026-03-30
近些时日不晓得有多少投身于航模、致力于机器人项目的友人就同一问题向我进行过询问:“舵机马达缘何持续转动,全然不受操控?”无须着慌,这实际上是一种颇为例证俱全的故障表现情形。当我们遭遇此种问题之际,暂且不要急忙去拆解机器,极有可能是在控制信号、机械限位或者程序逻辑方面出现了些许微小的状况。就在今日,咱们来展开探讨一番,舵机为何会呈现出如“发疯”般不停转动的态势,以及怎样将其“制服”。
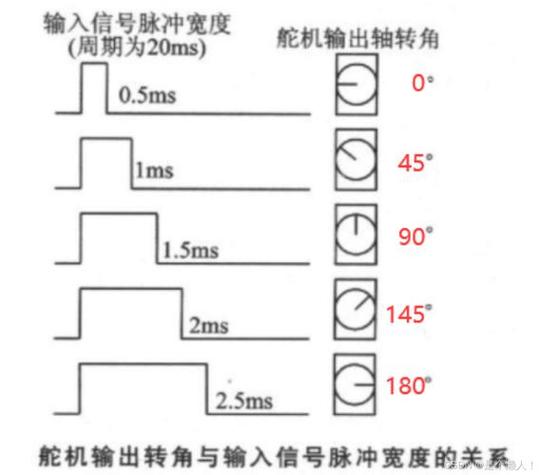
舵机自身是个十分顺从的“执行者”,其核心逻辑在于依据信号脉宽来判定转向何处。要是马达持续转动,最为常见的缘由便是信号线根本未曾接收到正确指令。这也许是接收机没电了,也许是信号线松动了,又或许是你所使用的PWM信号频率与舵机不匹配。在这种情形下,舵机就如同在“等红灯”,然而路口始终没有信号,它自然而然就慌了神。
可先前去查验一下控制器的输出波形,要是你手头有示波器或者逻辑分析仪那是再好不过了,要是没有的呀,也能够运用万用表大致测量一下信号脚对地的电压,在正常情形下,它存在一个持续变动的电压值,要是发觉信号线对地短路或者压根就没有电压,那么问题便出在信号源上面,而非舵机自身了。
咱平常所使用的标准舵机舵机厂家伟创动力,其内部存在着一个精密电位器,该电位器用于反馈当下的位置。你能够将它想象成舵机的“眼睛”,它时刻向控制板传达:“我已转到此处伟创动力,停下!”要是这双“眼睛”蒙上了灰尘,或者干脆停止工作了,控制板接收不到反馈,就会认为尚未到达指定位置,于是便会拼命驱动电机,进而造成一直转动的现象。
情况这般,于舵机遭受摔落之后,或者历经长时间高负载运用以后,尤为常见。电位器出现磨损状况,内部碳膜出现断裂情形,均会致使反馈效果丧失。要是该舵机属于金属齿轮舵机,偶尔会出现齿轮组被卡死的现象,进而使得电位器无法伴随转动。一旦遭遇这类物理性损伤,依靠软件是无法调整好状态的,通常而言需要更换电位器,或者直接更替一个全新的舵机总成。
若是你自己借助单片机或者开发板去操控舵机,那就得认真审视一番代码了。有没有这种可能性,你于循环里面源源不断地发送“转动”的指令,却忘掉设定目标角度呢?比如说有些新手朋友编写代码时,没有添加延时,致使舵机还没来得及转到指定位置,下一个指令便接踵而至,看上去就仿佛一直在转动。
在调试阶段时,建议你先将控制逻辑予以简化,比如说先固定使得舵机能转到90度的位置,进而观察它是不是可以稳稳地停住。要是能够停住的话,那就表明舵机的硬件没有问题,而问题是出在了动态控制的那些里头。特别是开展机器人项目之际,要是舵机需要持续地输出扭矩,那么要记得检查一下是不是误触发了“连续旋转模式”。
这个缘由极易被忽视,然而于实际运用当中极为常见舵机品牌伟创动力,当舵机刹那间启动或者负载加大时,需较大的电流,要是电池电压不足,或者电源线过细致使压降过大,舵机内部的电路会反常复位,导致逻辑紊乱,呈现出来的情形便是不受控制地胡乱转动。
你能够尝试为舵机单独予以供电,或者去更换一块具备更强放电能力的电池。众多标准舵机的堵转电流能够达到1至2安培,要是你采用的是一块普通的9V电池或者通过USB供电,肯定是无法带动的。请记住,电源不但需要电压相匹配,电流余量同样也要预留充足,特别是在同时驱动多个舵机的情形下。
别轻视那三根纤细的线,它们分别是电源、地以及信号,接触不良乃是硬件故障之中的“隐形杀手”。尤其在移动设备之上,伴随设备的抖动,插头会出现松动的情况,信号便会时而有时而无,如此一来,舵机就会进入到一种不确定的状态,呈现出“神经质”般地抖动或者持续转动的表现。
你将舵机的插头拔下来,再重新插紧,查看针脚有无氧化或者弯曲。倘若线是自己焊接的,那核对下焊点有没有虚焊。这类软故障排查起来尽管麻烦,然而通常解决起来是最为简单的。要是你使用的是延长线,同样要记得检查延长线自身是否完好。
看过这些剖析之后,你手上那个“逆反”的舵机此刻可有思路了吗,下次碰到这类问题,不妨先依照这几个方面核查一番,大体能够解决多数情形,你于实际项目当中还遭遇过哪些舵机的怪异故障,欢迎在评论区予以分享,咱们一同交流经验,也别忘记点赞转发,以使更多玩以及机器人的朋友少走冤枉路!























