



























TECHNICAL SUPPORT

发布时间: 2026-04-04
即使你向舵机发出一个使之向右转九十度的指令情形下,它仍旧顽固地向左转了九十度,这般状况于实际利用里并非罕见。舵机表现出反向转动并非是设备出现故障,却是被控制信号、安装的方式或者机械连接等好多因素一同作用起来的成果。在这篇文章里将会完整地剖析舵机反向转动的关键原理,并且给出经过验证所得到的解决办法。
舵机转动方向,是由内部控制电路,依据输入信号跟反馈信号的差值来决定的。当出现反向转动这种情况时,本质上属于以下三种情况当中的一种:
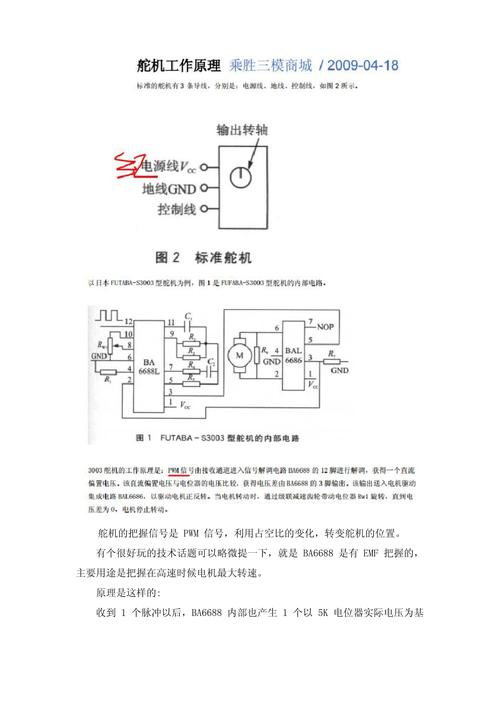
由舵机接收PWM信号(脉宽调制信号),以此来确定目标角度,标准舵机的PWM信号规范是这样的:
反向原理呈现这样的情况,假如你所拥有的控制系统送出的PWM信号范围跟舵机预期的方向是相反的,比如说,1.0ms对应的角度是0度,2.0ms对应的角度是180度,这并非是标准的0.5ms到2.5ms,那么舵机就会做出跟预期完全相反的转动动作。
于实际的机械结构当中,舵机臂的安装角度一事,会直接对输出轴的相对转动方向产生影响。
典型案例呈现:有一台六足机器人,其左侧腿部的舵机运用正向安装方式,右侧腿部因为要便于布线故而采用倒置安装方式,在这样的情况下,当向左右腿发送相同的“抬起”指令时,鉴于安装方向是相反的原理,某一条腿会向上抬起来,然而另一条腿却会向下踩下去,这种现象并非是舵机出现故障,而是由于安装坐标系没有实现统一造成的。
这是最常见的混淆来源之一。
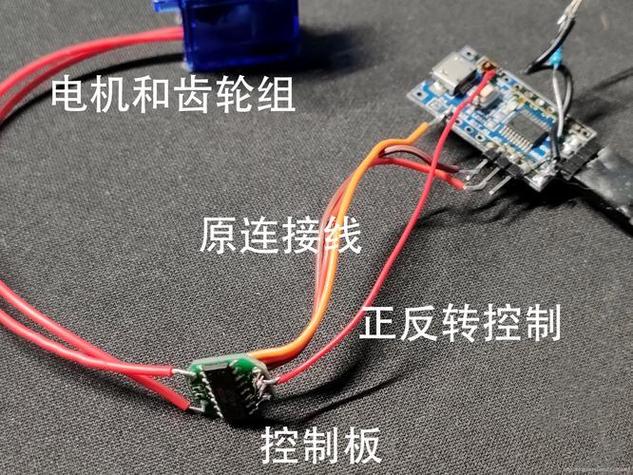
核心原理是,连续旋转舵机内部把角度反馈电位计取消了,把PWM信号1.5ms当作停止点,低于1.5ms(像1.3ms)就朝着一个方向旋转,高于1.5ms(像1.7ms)便朝着相反方向旋转,要是错误地把标准舵机的控制逻辑(绝对角度)运用到连续旋转舵机上,就会出现“明明要向右转却向左转”的困惑。
在控制代码那儿直接把角度值取反,这是最为快速的方案,且是那种不需要对硬件进行改动的方案。
平台示例:
// 原始指令:转向90度
int = 90;
// 反向修正:如果舵机实际转动与指令相反
int = 180 ;
.write();
通用公式:
修正后角度 = 最大角度范围 目标角度
适用于0180度舵机:修正角度 = 180 目标角度
如果你直接输出PWM信号,可以重新映射脉宽范围。
修正逻辑:
原始映射:0.5ms → 0度,2.5ms → 180度
反向映射:0.5ms → 180度,2.5ms → 0度
实现公式:
反向PWM脉宽 = 最小脉宽 + 最大脉宽 原始脉宽
原本的一点五毫秒处于中位状态,最大为二点五毫秒,最小是零点五毫秒 ,反向计算等于零点五加二点五减一点五得出一点五毫秒,且中位保持不变。
原始的0.5毫秒,而后转变为反向,其数值等于0.5加上2.5再减去0.5,结果是2.5毫秒,此过程是从0度转变为180度。
对于已安装好的系统,最简单的机械修正方法是:
1. 反向安装舵机:将舵机在支架上旋转180度安装
2. 更换舵机臂安装孔位:选择对角线的安装孔
3. 增加反向传动机构:添加一个惰轮或交叉皮带
需留意的事项是:机械方面的调整会对所有角度产生影响,其中涵盖了中位。在进行调整之后,重新校准舵机的中位,一般是发送1.5ms的PWM信号,还要重新安装舵机臂,使其与目标中位达成对齐。
部分数字舵机支持通过编程器直接修改转动方向参数。
操作步骤:
1. 使用舵机编程器(如适用于特定协议的USB适配器)连接舵机
2. 进入参数设置界面
3. 找到“方向”或“ ”参数
4. 从“”改为“”
5. 写入并保存
在机器人竞赛里,此方法极其的干净,在工业应用当中,此方法也是极其的干净,并且它不需要对代码加以修改,同样也不需要去改造机械结构。
如果你遇到舵机转动方向错误,按以下顺序排查:
第一步:确认舵机类型
标准舵机(转动有角度限制)→ 检查控制信号范围
连续旋转舵机 → 确认1.5ms是否确实对应停止状态
第二步:测试中位信号
发送1.5ms PWM信号
标准舵机应停在90度中位;连续旋转舵机应完全停止
如果不是,说明舵机零偏或信号基准错误
第三步:测试两端极限
发送最小脉宽信号(通常0.5ms):记录转动方向
发送最大脉宽信号(通常2.5ms):记录转动方向
两个方向应与你的预期一致
第四步:检查控制系统配置
证实控制板相关的PWM库设置,像、STM32、 Pi这些控制板的情况。
有些舵机库之中伟创动力舵机,具有()方法里的脉宽范围参数,去确认一下可是默认值?
舵机反向转动,其本质在于,目标角度跟实际角度的映射关系出现了取反。不管是软件层面的信号反向,机械层面的安装方向,又或是硬件层面的参数配置,最终都呈现为,控制系统的期望值与舵机内部电位计反馈值之间的减法关系被颠倒了。
关键结论是,舵机并非识别“左”和“右”,而是只认准了“PWM脉宽所对应的位置”。要是你下达的指令脉宽范围跟舵机的内部映射范围是相反情形,那么转动方向肯定会相反。
1. 开发阶段:于代码里预留方向修正参数,起初设定为1(此为正常状态),当碰到反向情况时变更为1,将其与角度值相乘便可。
2. 处于调试阶段时,要先用速度较低的状态,以较小的角度(像是10度那样)来测试方向,在确认没有差错之后,才开展全行程的运行。
3. 多舵机系统,要去建立一份统一的坐标系定义文档,要明确出来每个舵机的安装朝向,以及零位对应关系。
4. 开始作选型决定的这个阶段:要是存在需要进行双向连续转动这种情形,优先去选取那些明确被标注成“连续旋转舵机”的产品,千万别尝试去对标准舵机进行改装。
采取上述方式,你能够在五分钟之内找出舵机反向转动的缘由并予以修正。要记住:反向转动并非故障的所在,而是信号与机械定义发生了错配的情况。将坐标系统一起来,校准信号基准点,预留软件用于修正参数伟创动力,这三项措施能够避免百分之九十九与方向有关的问题。























