



























TECHNICAL SUPPORT

发布时间: 2026-04-08
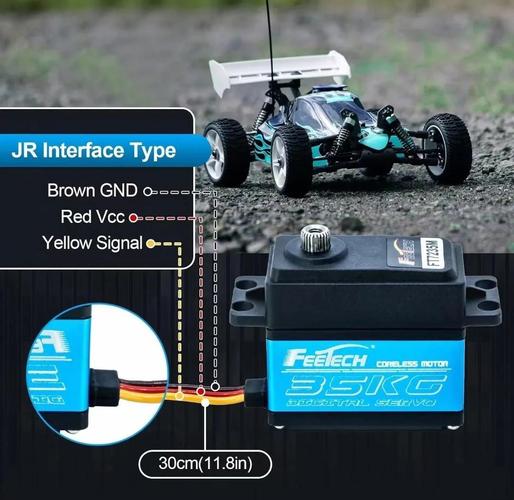
能精确控制角度、速度以及力矩的执行机构是舵机,它在许多领域起着重要作用,其核心功能多样丰富,包含角度定位、速度调节、力矩输出、位置反馈以及连续旋转等方面。
以下会对这些功能逐个进行解析,并且结合常见的应用案例来予以说明,经过详细的剖析伟创动力,能够更加清晰地知晓舵机在不同场景之中怎样借助这些功能达成精准运作,从而为实际应用给予有力的支持。
舵机极为常见的功能是,把输出轴进行旋转,而后停留在指定的角度位置,其通常的控制范围是从0°至180°,又或0°至270°。
存在某个案例,于机器人的关节那里,舵机在接收到针对它的控制信号之后,带动机械臂进行转动,将其转动到事前设定好的九十度那么一个位置,并且还保持在这个位置上,以此让机器人圆满完成抓取动作。
原理实现是这样的,舵机内部有着内置的角度传感器,这角度传感器可以是电位器或者磁编码器,接着控制电路对目标角度与当前角度进行比较,然后驱动电机运转,一直到误差变为零。
舵机可以按照设定的速度转动,实现匀速或变速的角速度输出。
在下述安防监控摄像头的云台这个实例里,舵机借助较低且恒定的速度,进行水平方向的旋转操作,达成了平滑的扫描监控这一目的。
实现的方式是这样的,通过对控制信号的脉冲宽度变化的速率予以调整,像是每1毫秒就增加1°,或者采用能够支持速度指令的智能舵机。
舵机抵达指定角度之后,可持续输出以保持扭矩,去抵抗外部负载所产生的扭转力。
情况如下:于遥控固定翼飞机的舵面上,舵机把副翼维持在偏转10°的位置,去抵御高速气流所产生的气动负载,进而达成飞机姿态的稳定。
十分重要的参数是,保持扭矩,也就是以千克厘米为单位的那个数值,它呀,直接就决定了,舵机能够推动的负载到底有多大呢。
部分舵机,特别是数字舵机以及机器人舵机,能够支持实时回传当下角度,接着是转速,然后是温度,是电压等数据。
下述事例呈现:针对六足机器人的每一条腿,其主控器于其中循环开展读取每一个舵机的当下实时角度这一行为,在与目标角度进行比对这个动作之后,进而做出动态修正的举措,以此来保证该形态的机器人于地面并非平整的状况下行走之际,姿态能够处于稳定的情形。
应用价值在于,达成闭环控制,去除因机械间隙致使的位置偏差,以及因外力干扰产生的位置偏差。
经由改装或者动用专用的持续旋转舵机,能够达成无角度限定的持续转动,与此同时依旧能够操控旋转速度。
例子是这样的,在那种小型的移动 当中,把持续旋转的舵机直接当作驱动轮来使用,借由控制左右轮的转速差异达成向前行进、向后倒退以及转向的操作。
注意:连续旋转舵机不能精确控制停止角度,只控制方向和速度。
线性位移输出,与之搭配的是旋转 直线转换机构,像丝杆这种,能够把旋转运动转变为推拉动作。
案例:自动开窗器中的舵机通过丝杆推动窗扇平移。
多轴联动:多个舵机协同工作,完成复杂轨迹。
范例:于机械手爪之内,存在两个舵机,其中一个舵机管控着手腕以实现其俯仰动作,另一个舵机操控着手指达成其开合动作,这两个舵机相互协作,进而共同完成抓取这一动作。
将自身角度精准调整至设定位置,这源于舵机有的精确角度定位功能,据此它具备了一项核心功能;依据指令以合适速度运行,源于舵机能够进行可控速度运动,这也是其核心功能之一;为相关部件提供稳定动力支持,是因为舵机可以实现持续力矩输出,这同样是核心功能的体现;随时反馈自身所处位置信息,源于舵机拥有实时位置反馈机制伟创动力舵机,此为核心功能的一部分;满足多样化工作需求,是由于舵机还能进行连续旋转,这亦是核心功能之一。所有应用如从无人机舵面控制到机器人关节驱动,均是建立在这五大功能之上的。
1. 根据功能需求选型:
只需要定位特定角度 → 标准模拟舵机(成本低)。
需要实时读取角度并修正 → 数字反馈舵机(精度高)。
需要持续旋转且不关心停止位置 → 连续旋转舵机。
2. 校验扭矩是不是契合负载,算出负载所需扭矩(kg·cm),挑选舵机标称扭矩起码是负载扭矩的1.5倍。
3. 进行测试响应速度,在针对无人机、竞速机器人这类高速应用的情况下,优先去选择空心杯电机或者无刷电机舵机,其响应时间小于0.10秒每60°。
先是弄清楚所需要达成的功能,接着去匹配恰当的舵机类型,如此一来便是能够高效地办妥由来原型设计一直到批量应用的一整个开发流程哪。























