



























TECHNICAL SUPPORT

发布时间: 2026-04-09
在平素运用舵机之时,好多使用者都碰到过这等问题:明明已然向舵机传送稳固角度指令,舵机却没法安稳维持于指定位置,而是产生无规律自行转动、晃动因、迟缓漂移或者指向偏差,这般现象便被称作“舵机跑舵”!
先说简单的,舵机跑舵这种情况,就是舵机实际输出的角度,跟控制信号所要求的角度不一样,而且没办法自动校正到正确的位置,处于这样一种状态。它会直接致使设备失控,导致动作失效,这是舵机应用当中最为常见,并且需要马上处理的故障之一。
您可以通过以下三种常见情况快速判断:
情况1:位置漂移
给予舵机一个明确确定的固定角度指令,比如使得机械臂维持保持水平状态,舵机会转动到该指定位置,然而在接下来随后的几秒钟时间之内,它会开始渐渐地缓慢朝着一侧方向进行偏转,从而偏离离开目标角度。
情况2:无规则抖动
舵机,在不存在外部指令有所变化的情形下,其自身持续出现小幅度、高频率的左右摆动状况,没办法稳定地停止于任何角度。
情况3:指向偏差
发出一个已明确知晓角度的指令,像90°这样,然而舵机实际停下在显著不一样的角度,比如70°或者110°,并且在多次发出同一个指令之后,停下的位置并不相同。
基于伺服控制原理以及大量维修案例,舵机出现跑舵现象主要是源自以下四类问题,您能够对照着进行排查。
原理是,舵机内部有一种位置反馈电位器,它属于可变电阻,随着舵机转动,会输出与之对应的电压值给控制芯片。当电位器内部的碳膜或者触点,经历长期磨损之后,就会产生不稳定的电阻跳变,进而致使控制芯片误判当前位置,于是不断发出错误的修正指令,最终引发抖动或者跑舵。
典型表现:
舵机使用时间较长(通常超过200小时重载运行)后出现跑舵
在某特定角角度间隙当中,(像是间隔从三十度到六十度这个范围),抖动呈现显著状态,在其余角度范围,情况正常。
用手轻摇舵盘时,反馈不稳定
:
去直接进行电位器的更换操作,这里所需要的是那种型号匹配的精密电位器,像是5kΩ的线性电位器,或者是10kΩ的线性电位器。
专门进行维修时,要是不拥有焊接的条件,那么建议直接去更换舵机内部的电位器组件,或者是整个舵机。
保持警惕:防止舵机长时间于极限角度,像 0°或者 180°那般,承受大力矩,因为如此这般会加快电位器磨损。
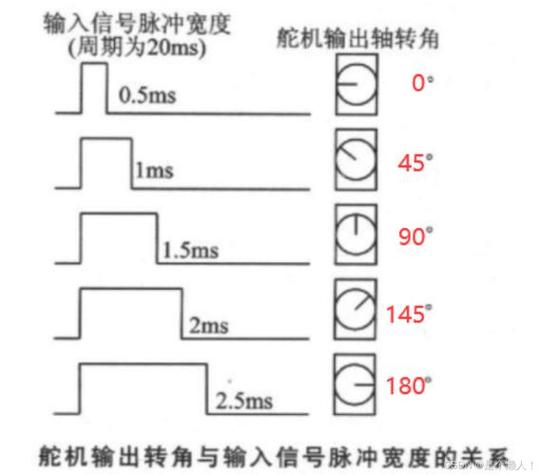
,舵机的控制信号一般而言,通常是那种有着20ms周期的PWM信号,这个信号里脉宽在0.5ms到2.5ms之间对应着角度。接着,要是信号线遭受到电磁干扰,比如说和电机电源线并行的情况,又或者供电电压出现波动,并且超出了额定范围,像额定5V的舵机,实际电压降到了4.2V这样,就会致使控制芯片没办法正确解析脉冲宽度,或者输出力矩不足,进而被外力推动。
典型表现:

多个舵机同时工作时,个别舵机出现跑舵
舵机供电线较长(超过50cm)或线径过细
使用电池供电且电量不足时,跑舵随电池电压下降而加剧
:
隔离信号线,采用双绞屏蔽线当作PWM信号线,且要与大电流线路保持距离。
实施独立的稳压供电举措:针对舵机来提供独立的稳压电源,举例来说就是运用5V/3A以上的BEC或者稳压模块,从而保证电压波动小于或等于正负0.2V。
进行加装滤波电容的事宜:于舵机电源的正极以及负极之间,去并联一个容量处于100微法至470微法范围的电解电容,以此来将瞬时电压尖峰予以吸收。
舵机内部存在减速齿轮组,其材质为塑料或者金属齿轮,在长期受力之后,齿面会出现磨损状况,或者齿轮轴孔会扩大,进而产生“回程间隙”,这是原理之一。当舵机处于停止状态时,外力能够借助间隙推动输出轴发生偏移,结果电位器却依旧留在原来位置伟创动力舵机,如此便会造成控制芯片做出错误判断,就会引发不断反复调整的情况。
典型表现:
在舵机停止之后伟创动力,借助手能够轻轻地转动舵盘,转动的角度为一个小角度,即超过1°减去2°这样的范围,并且在松手以后,舵机并不自行回位。
跑舵方向与外力方向一致
金属齿轮舵机磨损后会产生金属碎屑,伴随异响
:
去找寻相同型号的齿轮组来进行更换,对于塑料齿轮而言,建议将其升级为金属齿轮,从而完成齿轮组的更换。
变更间隙,针对具备可调节性质的结构而言,能够于齿轮轴之上增添垫片以此来降低虚位,然而其操作的困难程度较高。
当齿轮出现严重磨损状况,并且配件难以寻觅时,直接去进行舵机的更换,这乃是最为经济的一种方案。
原因在于,控制端,像单片机、遥控接收机这类,所输出的PWM信号,其周期处于不稳定状态,并且脉冲宽度出现跳变,又或者控制程序里的定时器,其精度是不足够的,如此一来,便会致使舵机,接收到持续变化的指令角度,进而会错误地认为那是正常的控制信号,最终就跟随其进行移动。
典型表现:
更换同一程序下的另一个舵机后跑舵消失
借助于示波器查看控制信号之际,或者通过逻辑分析仪查看该控制信号之时,竟然察觉到脉冲宽度出现了抖动现象,而且这种抖动所产生的误差是大于10μs的。
程序中使用延时函数产生PWM,而非硬件定时器
:
采用内置硬件PWM外设,摒弃运用软件延时去模拟PWM的方式,转而选用单片机自身搭载的硬件PWM模块。
降低对其进行控制的频率,把PWM周期稳定地维持在20ms这个数值上,也就是50Hz,要防止去运用并非标准的周期,像是10ms或者30ms。
进行数字滤波的增加设置:于程序里,连续地读取信号值共3至5次,将所读取的信号值求取平均值而后,再把平均值输出给予舵机。
要是您手上持有一个出现跑舵情况的舵机,那么请依据以下步骤,于5分钟之内确定问题所在:
步骤 操作 正常结果 跑舵时可能发现 |
请你明确一下需求呀,仅给出这样的格式内容,不太清楚要进行怎样的改写呢。
进行换电源测试,采用新的稳压电源比方说5V/3A直接给舵机供电,发送固定90°指令,舵机稳定停在90°,用手推会产生阻力,跑舵情况依旧,从而得出去排除电源问题的结论。
跑舵消失→电源不稳导致 |
把控制信号进行更换来做测试,使用已知是正常状态的控制器,像是另一块开发板或者舵机测试仪,去发送相同的指令,舵机据此准确回应,然而跑舵现象还是始终存在,那就表明是舵机自身出现了故障。
跑舵消失→原控制器信号问题 |
3. 手动虚位检测 舵机在断电之后,使用手缓慢地轻转舵盘从而感受间隙 基本上几乎是感觉不到有空转情况的。
无空转但仍跑舵→电位器故障 |
核心观点再强调:舵机跑舵的本质是“指令位置与实际位置之间的闭环控制失效”,绝大多数情况下由电位器磨损、供电不稳或齿轮虚位引起,而非软件或遥控器的设置问题。
如果您正在遭遇舵机跑舵,请立即执行以下行动:
1. 选用稳压电源去替换现有的供电,以此来优先进行供电方面的检查,将那般极易会被忽视掉的电压波动缘由给排除掉,而这一步骤能够把大约25%的跑舵问题给解决掉。
2. 借助舵机测试仪,花二十元购置一款独立的舵机测试仪,其能够输出纯净的PWM信号。当接上测试仪后跑舵不见,表明您的控制端信号存在问题;若跑舵仍然出现,那么故障就在舵机自身。
3. 根据使用时长决定维修方向:
当舵机的使用时长超过了100小时,或者出现了特定角度的抖动情况,那么就要直接去更换电位器,或者更换整个舵机。
舵机使用不足20小时出现跑舵 → 优先排查电源和信号干扰
4. 长期预防措施:
为舵机供电线并联470μF电容(靠近舵机端)
定期对齿轮组开展检查工作,每运行五十小时的时候,进行加注专用润滑脂的操作,其中塑料齿轮所使用的是硅脂,而金属齿轮所使用的是二硫化钼脂。
避免在舵机极限角度长期施加超过额定扭矩80%的负载
凭借上述方案,超过九成的舵机出现的跑舵问题能够于30分钟之内完成定位以及解决。要是经过排查之后依旧没办法修复,那么给予的建议是直接去更换舵机,这是由于内部电位器或者控制芯片展开维修所需要的成本常常会高于舵机自身的价值。























