



























TECHNICAL SUPPORT

发布时间: 2026-04-10
具备似名之数字舵机与模拟舵机,其内部原理以及实际表现上有着显著差别。好多初学者于实施选购或者参与调试之际发觉,模拟舵机能于某特定角度呈现抖动状况,然而数字舵机却可稳定地停止于该角度。再者,在面对相同控制信号时,数字舵机的反应更为迅速同时噪音更为尖锐。这些现象背后所潜藏着的根本缘由,是两者处理脉冲信号的方式全然不同。此篇文章借由对比原理、关键参数以及真实案例,助力你迅速区分这两种舵机,并给出能够配合原理视频以直观理解的推荐。
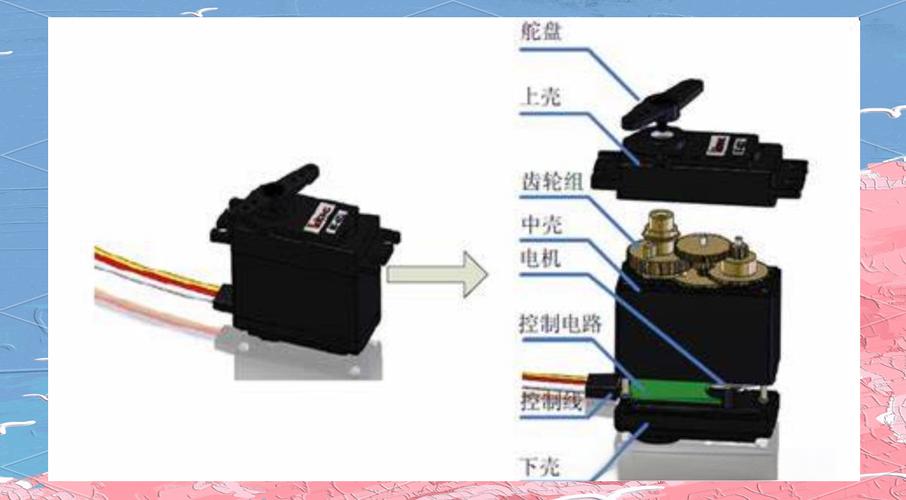
模拟舵机的内部,是由控制电路、直流电机、电位器以及减速齿轮共同构成的。其运用的工作方式,是极为直接的:
被控制的信号,乃是具备周期为20毫秒(也就是50赫兹)的PWM脉冲,脉冲的宽度处于0.5毫秒至2.5毫秒这个范围,此范围对应着0°至180°。
对控制电路来说,它会持续去检测输入脉冲跟电位器反馈电压之间的差值,只要存在差值,也就是当前位置和目标位置并非一致的情况,那么电机就会以全速进行转动,一直到差值变为零。
这表明,对于模拟舵机而言,一旦它并未处在所要到达的那个目标方位,那么它就会持续不断地向外输出最大程度的扭矩,以此来进行修正,并且,这种修正的频率是等同于信号频率的,而信号频率为每秒五十次。
关于常见问题的案例情况如下:有一位身为航模爱好者的人,在用于飞行的固定翼飞机之上,使用了模拟类型的舵机伟创动力舵机,之后,他察觉到在飞机处于高速飞行这个状态的时候,舵面始终是处于轻微抖动的状况。其原因在于,气流所产生的扰动致使舵面出现了微小的偏移情况,而模拟舵机马上就以最大的扭矩进行回正的操作,然而,在过度修正之后,又朝着相反的方向偏离了,进而形成了所谓的“震荡”现象。此时此刻形成这种状况的原因,正是模拟舵机所具备的“持续用力一直到位置完全匹配”这样一种特性所造成的。
数字舵机在结构上多了一个微处理器,信号处理逻辑完全不同:
同样接收周期为20ms的PWM脉冲,不过内部微处理器在对脉冲完成解算之后,会以300Hz甚至更高的频率,也就是每3ms一次,来驱动电机。
它不会一直保持着全速去转动,微处理器会依照差值的大小,自动地调整驱动脉冲的宽度,当差值大的时候,输出大电流快速地靠近,当差值非常小的时候,输出窄脉冲,使得电机缓慢地进行微调。
至关重要的优势在于,那种数字舵机能够“停留在行进途中”,也就是在趋近目的位置之际,它会经由极为微小的步幅来实施定位操作,以此防止出现过冲以及震荡的情况。
针对常见问题的案例来说,有一位身为机器人爱好者的人,给六足机器人更换了数字舵机,之后呢,发现这个机器人站立的时候,各个关节不再发出那种嗡嗡响的声音了,并且电池续航能力还提升了20%。这是因为数字舵机在保持位置之际,并非持续以满电流输出,而是每秒会有数百次短脉冲进行“轻推”操作,其平均电流相较于模拟舵机低30%至40%(此数据来源是《无线电》杂志在2024年所做的舵机测试报告)。
有必要特别予以说明,在市面上存在着这样一些情况,某些被称作“数码舵机”的产品,仅仅是将模拟电路替换成了数字芯片,然而其驱动逻辑依旧采用的是模拟方式,也就是持续修正的那种方式。而真正意义上的数字舵机,是要满足两个条件的,其一为内部驱动频率要大于或等于300Hz,其二是要具备可编程死区设置。
根据你的实际场景选择:
针对航模固定翼、帆船、普通机械臂而言,模拟舵机是足够的,情况是这样的,其动作频率比较低,具体为每秒 1 至 2 次修正,并且模拟舵机具备便宜、耐用的特性,推荐的参数设定为,扭矩要大于或等于 2.5kg·cm,死区要小于或等于 10μs。
在竞速无人机、机器人关节以及摄影云台这些应用场景中,使用数字舵机。在诸如高频振动、反复进行微调的场景状况下,模拟舵机是会遭遇过热进而烧毁现象的。需要留意的是,数字舵机要与BEC(也就是稳压模块)进行供电配合,这是由于其一瞬间的电流能够达到5A以上。
要是处于不确定的状况:采用一个简便的测试,用手轻轻地去拨动舵机臂 ,要是它呈现出“硬顶着不动”的情形并且发出尖锐刺耳的滋滋声 ,那就是数字舵机 ;若它先是让开然后再缓缓地回位 ,那便是模拟舵机。
“脉冲宽度调制”以及“高频微步进”的过程,是文字描述没办法直观去呈现出来的。建议你于视频平台搜索以下这些按照精准度进行排序的关键词组合:
1. “舵机 PWM 原理 3D动画”
2. “数字舵机 模拟舵机 示波器对比”
3. “伺服电机 死区 响应时间 实测”
最具优势的学习路线为,观察时长两分钟的3D动画,以此去了解内部机械构造,接着观看时长三分钟的示波器实测视频,通过该视频来对比两类舵机的电机驱动波形,之后回过头来查看本文所呈现的参数表,并做好记录。凭借如此方式,你不但能够挑选出合适的舵机,还能够自行排查诸如抖动、发热以及回中不准确等故障。
模拟舵机,有着50Hz的连续修正频率,适用于低频大扭矩的场景,成本较低,然而耗电,还容易抖动。
数字舵机,其内部具备高频微步进,它适合高精度的情况,且能够实现快速响应,同时具备省电的特性,还能保持静音,并且定位十分准确。
验证的办法是,听一听声音,去模拟舵机那种低频呈现嗡嗡的声响,数字舵机则是高频发出滋滋的声音,还要测量电流,数字舵机在保持的时候电流会呈现出下降明显这样一种状况。
1. 下次去买舵机的时候伟创动力,径直去问卖家,“驱动频率究竟是多少呢?死区可不可以进行调节呀?”要是卖家没办法回答上来,大概就是模拟舵机在顶替数字舵机了。
2. 要是你手上有闲置着的舵机,利用去发送有着1μs步进情况的PWM信号,实际测量得出最小响应脉冲,小于或等于3μs才算是真正的数字舵机。
3. 把此页面进行收藏,当你碰到舵机出现异常发热或者抖动的状况时,返回来对照“核心区别”表,百分之九十的问题是出在选型搞错或者供电不够的情况。
理解舵机最为直观的方式是原理视频,不单单要看文字,开启视频平台,搜寻“数字舵机 模拟舵机 原理动画”,花费3分钟观看完毕,你便能够完全区分它们。























