



























TECHNICAL SUPPORT

发布时间: 2026-04-17
日常于动手制作机器人、调试机械臂,或者操控航模时,您常常会碰到需令舵机进行“正转”或者“反转”的情形。举例来说,要是您期望机械臂的关节以顺时针方向抬起(此为正转),或者以逆时针方向放下(此乃反转),又或者使小车的前轮转动从而左右摆动伟创动力舵机,其关键均取决于舵机的控制。本文径直为您剖析舵机正转反转动的深层次逻辑、标准控制参数以及能即刻着手实践的代码实现伟创动力,以保证您能够迅速达成动作控制。
舵机本身并非直接去识别“正转”或者“反转”指令,其内部借助脉宽调制也就是PWM信号来控制输出轴的角度位置,正转对应的是PWM脉宽从中间值朝一个方向递增,反转则是朝着相反方向递减,标准舵机的角度范围一般是0°至180°,部分是270°或者360°连续旋转舵机,下文是以最常见的 0 180°舵机作为例子。
基准中间位置(0°):PWM脉宽 1500μs(微秒)
正向转动极限(设为 +90° 这种情况),PWM 脉宽值为 2000μs,此脉宽具体数值是依据舵机型号来定的,在常见的范围当中,数值从 1500μs 到 2000μs 是对应着角度从 0° 到 90° 的。
旋转方向倒转的界限(就像负九十度那样),脉冲宽度调制的脉宽是一千微秒,一千五百微秒到一千微秒的变化对应着零度到负九十度的变动 ,(其中一千五百微秒对应零度,一千微秒对应负九十度)。
具备绝对一致特性的事实依据,以上所提及的参数,契合工业标准舵机,像、Hitec等品牌通用规范的PWM控制协议,能够通过查阅各厂家技术手册来进行验证,其周期一般为20ms,也就是50Hz。
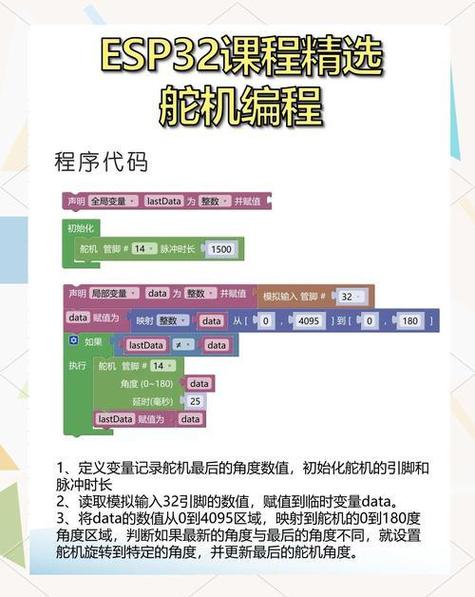
不管您运用的是,亦或是STM32,又或者是树莓派,其逻辑全然相同。下面以环境作为示例,给出能够直接运行的代码逻辑。
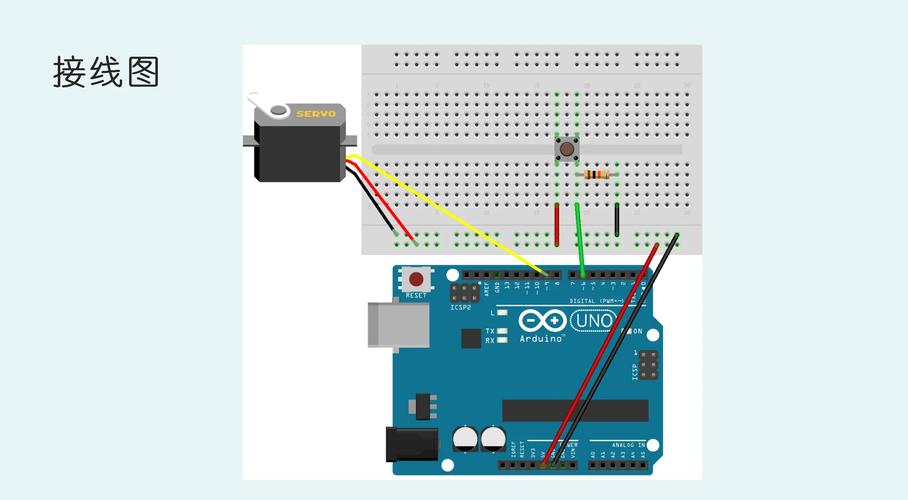
将舵机信号线连接到支持PWM输出的数字引脚(如D9)。
供电:舵机电源(通常5V)与逻辑电源共地。
// 定义标准脉宽常量(单位:微秒)
# 1000 // 反转极限(0°对应1000μs,实际为90°位置)
# 1500 // 中间位置(0°)
# 2000 // 正转极限(+90°位置)
// 正转函数:逐步增加脉宽
void (int = 15) {
for (int pulse = ; pulse <= ; pulse += 10) {
(pulse); // 输出PWM脉宽
delay(); // 控制转速
}
}
// 反转函数:逐步减少脉宽
void (int = 15) {
for (int pulse = ; pulse >= ; pulse = 10) {
(pulse);
delay();
}
}
// 底层脉宽输出函数(基于)
void (int ) {
(, HIGH);
();
(, LOW);
delay(20 / 1000); // 保证周期20ms
}
要指明的是,在实际运用当中,更值得推荐的是库,它的servo.write(angle)能够直接依据角度实施控制,朝着正方向转动的时候也就是角度呈现出递增的态势(举例来说就是从0变化到180),而朝着反方向转动的时候角度就是递减的情况(从180变回0),但是需要明白的是,对脉宽有所掌握是调试那些高级功能(像是速度控制、平滑运动等方面)的根基。
#
Servo ;
int pos = 0;
void setup() {
.(9); // 信号线接D9
}
void loop() {
// 正转:0° → 180°
for (pos = 0; pos <= 180; pos += 1) {
.write(pos);
delay(15); // 控制正转速度
}
// 反转:180° → 0°
for (pos = 180; pos >= 0; pos = 1) {
.write(pos);
delay(15); // 控制反转速度
}
}
产生这种情况的缘由是,大多数标准舵机的机械限位范围是0到180°,要是给出低于1000μs或者高于2000μs的脉宽,就会引发舵机内部的限位保护,进而舵机不会朝着相反的方向旋转。
针对该问题的解决办法是:对程序里脉宽的范围予以检查,查看其是否处于1000至2000μs这个区间之内。要是存在连续旋转的需求,比如像车轮那样的情况,那就得采用360°连续旋转舵机,此舵机正反转是由脉宽偏离1500μs的方向来决定的:当脉宽小于1500μs时舵机反转,当脉宽大于1500μs时舵机正转,而当脉宽等于1500μs时舵机停止。
原因:负载变化或电源供电不足。
采用的解决办法是这样的:运用独个的稳压电源,其规格为5V且电流在2A以上,并且在代码里借助delay值进行对称控制,就像方才所举例子里正反转都采用delay(15)这种方式。
:.write(90) ,delay(500) ,.write(0) ,先是转到90° ,停顿0.5秒 ,接着再转回0°。要是需要平滑连续运动呢 ,就采用步进循环并且移除中间的delay这一步骤。
1. ,需要准备硬件,具体包括,一块 UNO,一个标准舵机,该舵机可以是SG90或者MG995,还有5V电源,以及杜邦线。
2. 进行烧录代码的操作:把第二部分步骤3当中的完整示例,复制到 IDE这个软件里,然后进行编译并且完成上传的动作。
3. 呈现这样的现象,那就是舵机轴起初朝着顺时针方向也就是正转的方向转动了一百八十度,随后又向着逆时针方向也就是反转的方向回转至起始的那个点。
4. 修改参数,将delay(15)里的数值予以调整,该数值要处于在5至30这个范围之间,而后观察转速得变化情况,另外修改循环终点,就像这样。
舵机正转反转的本质之处在于,其是借由改变PWM脉宽,以此驱动角度递增,此为正转情况,或者驱动角度递减,这便是反转情形。对于标准的0到180°舵机而言,正转的时候角度值会增大,而反转时角度值则减小。对于360°连续舵机来讲,当脉宽大于1500μs时为正转。
的建议是,运用库函数servo.write(angle)迅速达成功能,接着深入领会脉宽,以此来应对诸如调速、多舵机同步等高级场景,并且一定要遵循舵机供电规范(信号线电流)。























