



























TECHNICAL SUPPORT

发布时间: 2026-04-23
舵机是一种小型驱动装置,它能够对角度或位置进行精确控制,其应用范围十分广泛,涵盖了机器人关节、航模舵面、工业自动化设备以及智能家居等诸多领域。它集成了内部的电机、减速齿轮组、控制电路以及位置反馈传感器,能够依据外部控制信号促使输出轴运动,并维持在指定角度。
有一个常见的案例,新手在制作简易机械臂的时候,想要达成抓取动作。要是直接运用普通直流电机,那就需要额外去加装编码器以及闭环控制,开发的复杂度是很高的。然而要是采用舵机,只是需要一条控制信号线、一条电源线还有一条地线,便能够使得机械臂关节转动到指定的角度,达成精准定位。这便是舵机价值最为直观的体现。
舵机实现思路依据控制方式、内部结构以及应用需求,主要存在以下四种情况。对这些思路予以理解,能够助力您迅速找寻到最契合项目的方案。
实现原理:
被称作模拟舵机的这一标准舵机,是靠接收PWM信号来予以控制的,该信号的周期大概为20ms,其高电平持续的时间处在0.5ms至2.5ms这个范围。高电平的时间和输出轴角度呈现出线性关系,一般而言,0.5ms对应的是0°,1.5ms对应的是90°,2.5ms对应的是180°。
实现步骤:
1. 采用单片机,像、STM32这类,去创生周期为20ms、占空比能够进行调节的PWM波。
2. 接着,把PWM信号线,连接至舵机的控制引脚,而其供电电压,一般是4.8V至6V。
3. 程序操控PWM高电平的时长,舵机内部的电路把脉宽转变为角度信号,借此驱动电机转向相应的位置。
适用场景:
关乎航模舵面控制的项目,涉及简易机器人的项目,还有小型云台的项目,这些项目针对成本敏感的情况,并且有着精度要求一般的状况。
关键限制:
位置反馈借助内部电位器达成,控制周期是固定的(50Hz),响应速度较为迟缓,角度分辨率通常大概为1°,不能够进行高速连续旋转。
实现原理:
如总线舵机这类智能舵机 ,其内部集成着微处理器 ,还有通信协议 ,像TTL半双工串口 、RS485等 ,能借助单总线或者双总线来并联好些舵机。可发送指定ID以及角度值的指令包 ,舵机在解析之后从而执行它 ,并且还能够回传温度 、电压 、当前位置等状态。
实现步骤:
1. 使多个舵机的VCC,与多个舵机的GND,以及多个舵机的信号线,一同各自并接到主控处的同一串行总线上。
2. 每个舵机拨码或写入唯一ID。
3. 主控发送数据包,其格式是“帧头+ID+指令+数据+校验”,举例来说,像这样:0x55 0xAA 0x01 0x03 0x5A 0xXX(这里面0x5A表示500°·0.1°)。
4. 舵机响应指令并执行,可同时读取多个舵机状态。
适用场景:
需要多个关节协同的复杂系统,有待实时反馈,如人形机器人,还有多自由度机械臂,以及仿生机器人之类。
核心优势:
只需3根线(电源、地、信号)即可控制数十个舵机。
可回传角度、负载温度等,便于实现闭环保护和复杂动作序列。
角度分辨率可达0.1°,支持ID扩展和自动扫描。
实现原理:
那种被称作连续旋转舵机的又名360°舵机的装置,把内部的限位装置剔除掉了,把电位器安置在了中间的位置,控制信号不再是对应绝对角度了,而是对应着旋转的方向以及速度。PWM高电平为1.5ms的时候代表着停止,大于1.5ms就会正转并且脉宽越大速度越快,小于1.5ms就会反转并且脉宽越小速度越快。
实现步骤:
1. 对标准舵机进行购买或者改装操作:须得先把舵机拆开,接着要去除输出轴上面的限位凸起,随后要把电位器触点调整到中点位置并且固定下来。
2. 对主控来说,输出的PWM信号处于0.5毫秒至2.5毫秒这个范围,而当中的1.5毫秒是停止的那个点。
3. 调整PWM值与停止点的差值控制转速。
适用场景:
存在这样一些场景,比如机器人轮式驱动,还有传送带,以及自动卷帘等,这些场景需要连续进行正反转,而不需要角度反馈。
注意:
不能用于关节定位,是因为连续旋转舵机无法获知当前位置,不能进行关节定点。要是需要实现转速闭环,那么可以选择带编码输出的款式。
实现原理:
舵机被设计成模块化,其中驱动板、电机、减速器、编码器以及通信接口皆为可独立更换的单元,用户能够依据负载、速度以及精度的不同需求来挑选不一样的组合,就像选用小功率直流电机搭配大减速比齿轮组从而获取大扭矩,又或者采用无刷电机加上高精度磁编码器以得到长寿命与高精度。
实现步骤(以自行设计为例):
1. 进行选型时的动力单元, 要依据扭矩以及转速, 来挑选有刷直流电机, 或者是空心杯电机, 又或是无刷电机。
2. 减速器选型方面,存在常用的金属齿轮,其具备低成本的特性,还有行星减速机构,这种有着高扭矩的优势,另外谐波减速也在其中,它能达到零背隙的效果,常用于精密机器人领域。
3. 关于选型位置的反馈是,电位器,其特点是价格便宜然而容易出现磨损情况,磁编码器,具备耐用特性且精度在14位以上,光电编码器,有着高精度的优势但对于防尘方面要求较高。
4. 设计驱动与控制电路:
有刷电机运用H桥驱动(像这样的),无刷电机则要FOC控制器。
如同STM32这类的单片机,对编码器进行读取操作,运行PID,针对串行或者CAN总线指令作出响应。
5. 结构封装: 设计外壳和输出法兰,兼容常见安装孔位。
优势:
维护成本低:某个模块损坏可单独更换,无需丢弃整个舵机。
适应性强:同一接口可快速换用不同扭矩的模块。
它的性能上限具备较高水准,其精度能够达到0.01°,扭矩可达到数十N·m,而且寿命可达数万小时。
典型应用:
工业协作机器人、高精度光电跟踪云台、医疗手术机器人。
根据您的实际项目需求,按下表快速匹配:
误区1:标准舵机可以改造成连续旋转来定位
情形是这样的,持续不断进行旋转动作的舵机,没办法把角度情况反馈出来,所以是不可以运用在那种有着需要记住位置要求的场景之中的。
妥善处理:要是有需要进行定位的情况,那就直接去选用标准舵机或者总线舵机,千万不要采用360°款式的。
误区2:舵机供电电压越高,扭矩越大
实际情况是,舵机内部的驱动电路存在有额定电压,电机也存在着额定电压,超过这个电压有可能会致使控制板被烧毁,而电压不足的时候则会出现力矩不够进而产生抖动的情况。
处理办法是:精确依照数据手册来进行供电,常见的供电范围是4.8V至7.4V,而高电压版本能够达到12V至24V。
误区3:一个PWM引脚只能控制一个舵机
实情是,单片机借助定时器能够输出多路各异占空比的PWM,与此同时控制多个标准舵机。
进行解决:运用像 Mega这样的多个PWM引脚,或者这类PWM扩展板,单个板子能够控制16至48个舵机。
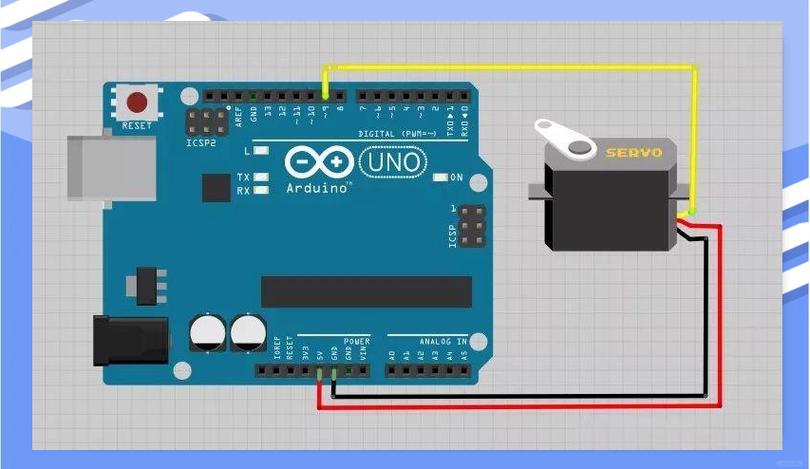
1. 若您是学生或爱好者,首次尝试:
直接去买一个9g的塑料齿轮标准舵机呢,也就是SG90型号的那种,再买上一块 Uno板。按照“Servo”库里面自带的例程,在10分钟的时间之内去实现角度的控制。这样做能够以最快的速度去验证PWM思路是不是满足需求。
2. 若您正在设计一款多自由度机器人:
丢弃PWM方案,径直选用串行总线智能舵机伟创动力舵机,比如那种采用半双工串口协议的型号。购买之际索要通信协议文档以及示例代码,优先挑选支持角度回读和过载报警的型号。
3. 若您需要工业级、长寿命、可定制的驱动方案:
按模块化设计的思路来进行,挑选无刷电机、磁编码器以及FOC驱动板当作核心,外壳能够根据您的设备接口定制适配,输出轴也能够根据您的设备接口定制适配。
重复核心观点:
舵机达成思路不存在“最佳”,仅有“最适配”,针对定位需求,挑选PWM标准舵机开启入门之路,对于多关节协同,非要采用总线智能舵机,对于持续运动,运用360°连续旋转类型,对于高端场景,抉择模块化自研方案,脱离实际负载、精度以及通信要求去谈论达成思路,必定致使项目再三返工。
对于最终行动给出的建议是:要明确您的三项关键参数,这三项关键参数分别是所需扭矩(以kg·cm为单位)、角度分辨率(以°或者0.1°为单位)、同时控制的舵机数量(以个为单位)。接着对照上文第二节当中所提到的四个思路,从而在其中选出1至2个适配方案。要是仍然没办法做出决定,那么可以先去购买最便宜的PWM标准舵机来进行原型验证,在经过实测之后再升级到总线或者模块化方案。























