



























TECHNICAL SUPPORT

发布时间: 2026-04-27
有种小型电机叫舵机,它能够精准控制角度以及速度,能使手工的“关节”活动起来。不管是简单的摇头风扇,亦或是复杂的机械臂、仿生机器人上,舵机都是达成动作的关键部件。下面罗列出5类常见的手工项目,用以帮你迅速找寻到契合自身的制作方向。
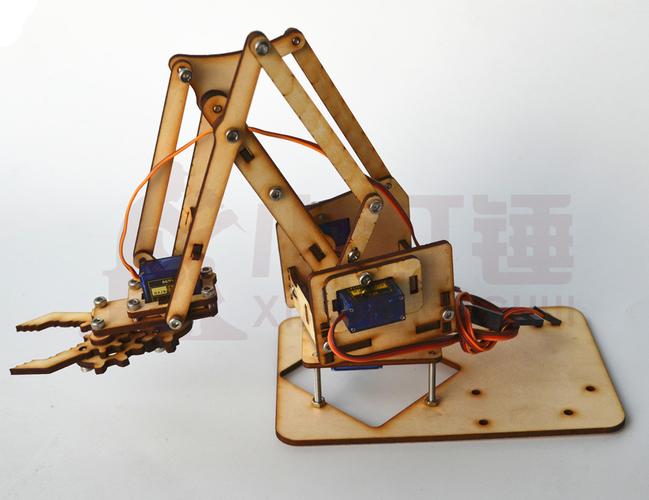
拿2到3个舵机进行叠加之举,便可制作出一个能够抓取小物件的机械臂来。其中一个舵机用于控制底座旋转,另外一个舵机负责控制大臂抬起,而第三个舵机则操控夹爪开合。这样的一类适宜用于学习舵机的角度控制以及连动逻辑。
需要用到的材料有,9克或者15克的微型舵机,2至3个,还有纸板,或者雪糕棒,或者3D打印结构件,以及控制板,比如 ,另外还有电池盒。
制作的要点在于,要使用硬纸板剪出臂杆的形状,接着对于舵机,需采用双面胶或者热熔胶进行固定。在调试的时候,要让每个舵机先独自进行转动,在确认其角度范围(一般是0至180度)之后,再开展组装。
常常出现的问题是,要是夹爪在抓取时呈现出无力的状况,那是由于舵机所具备的扭矩不够充足,这种情况下能够去更换更大扭矩的舵机,像25克金属齿舵机便是这样的类型,要不然的话就减轻夹爪自身的重量。
用8至12个舵机,能够制作出一个会走路的四足机器人,每条腿需要2到3个舵机,分别用以实现抬腿、迈步以及转向,这类项目需要通过编程来协调多个舵机的时序,不过手工部分并非复杂。
具备所需材料,分别为,8个微型塑料齿舵机,舵机支架套件,一块7.4V的锂电池,还有控制板。
进行制作时的关键要点为,能够先起始于两条腿的“单步态”来展开相关测试,去记述每个舵机于完整的一步当中的角度变化序列,接着再将其复制给予其他的腿。运用胶板或者冰棒棍去制作腿的连杆,如此能够切实有效地减轻重量。
常见状况是,好多初次进行制作的人会发觉机器人出现“顺拐”现象,这是由于两对侧的舵机动作未曾错开。正确的举措是,左前与右后归为同一组,右前和左后构成另一组,两组轮流抬腿。

借助舵机的来回摆动,能够模拟鱼尾的左右划水动作,或者鸟翅膀的上下扑动动作。仅仅需要一个舵机就行,再配合曲柄摇杆机构,或者直接连接摆臂便可。
需要准备的材料有,微型防水舵机,倘若要下水的话,或者是标准舵机,还有EVA泡沫,或者是塑料片,以及钢丝,又或者是鱼线。
要点如下,仿生鱼的尾部摆着的臂要尽可能的轻,舵机摇着的臂跟鱼尾相连接的那个点靠近尾巴的前端区域,摆动的频率需控制在每秒一至两次,如果过快就会致使舵机产生发热现象。
案例参照情况是,怀有手工喜好之人,利用9克舵机,配上饮料瓶,制作出一款仿生鱼,于水池里头能够持续游动整整15分钟,其重中之重是,运用气球膜去包裹舵机主板,进而做成了简易的防水措施。
将之用于手工装配完成的拥有遥控功能的车辆或者船只之上,舵机被直接用以把控前轮转向或者船舵进行偏转动作。这属于RC里头最为经典的应用实例一种情形,只用一个重量区间为5克至9克的舵机便能够达成此项操作。
所需材料:微型舵机1个、玩具车轮及底盘、遥控收发模块、电池
对于制作当中的要点而言,要把舵机摇臂借助连杆连接到转向轮轴,在舵机处于中位的这个时候,车轮指向正前方,左右两边最大的转角通常设定为30度到45度之间,假设使用的是连续旋转舵机,那么能够直接当作动力电机来驱动车轮。
常出现的问题是,舵机会抖动,或者转向到不了位,一般来讲这是由于供电的电压不够充足。建议采用在4.8至6V之间的稳定电源,并且要防止和动力电机共同使用同一根电源线。
舵机与简单的感应模块进行配合,能够制作出实用的智能手工,比如说,利用人体红外传感器来触发舵机,使得风扇头进行左右摇头的动作,又或者是借助超声波测距,在手靠近的时候,舵机将垃圾桶盖打开。
所要用的材料有,一个标准舵机,传感器模块,其类型包括红外、超声波、光敏,还有控制板,以及电池。
制作的关键要点在于,对于这类项目而言其重点在于阈值的设置,为举例说明此情况,就像自动开盖这种情况,即设定当该距离小于20厘米的时候,舵机进行转动90度的动作,随后保持2秒之后回转,并且舵机转动速度的调节需要偏向慢,以此防止盖子撞击从而发出噪声。
有这么一个案例要分享伟创动力舵机,有一位身为爱好者的人,通过使用9克舵机以及光敏电阻,制作成功了“光照追踪向日葵”,其中,舵机能够带动太阳能电池板,让其始终朝着最亮的那个方向,进而为小风扇供应电力。
关于扭矩大小,对于夹取或者承重项目,像机械臂、机器人腿这类,建议选用超过2.5kg·cm的金属齿舵机;而对于轻量化摆动的情况,比如鱼尾、风扇,可采用低于1.5kg·cm的塑料齿舵机。
角度范围方面呢,就针对普通情况而言0到1八十度方向把控的舵机能够满足百分之九十的人工制作;要是存在需要持续不停转动的情形(好比车轮状态),那就得挑选三百六十度能够持续转动的舵机咯。
供电电压,好多微型舵机用于运转使其发挥作用所依据的工作电压范围是4.8至6.0V,借助3节或者4节AA电池通过串联的方式得以提供所需电压,要么使用的是一块1S/2S锂电池,凭借这些就能实现正常运转,达成相应功能。
关键核心点在于,不管你打算去做何种处于动起来状态的,舵机都能够给予其具备精确可控特性的动作。而动手操作的关键之处并非资源伟创动力,而是要从最为简单的项目起步。
行动建议:
1. 由单舵机项目开启入门之旅:举例来说,运用一个舵机与纸板打造一个呈现“点头摇头”样式的纸偶,仅仅30分钟便能够目睹成果。
2. ,画出动作草图,明确舵机安装的位置,同时明确摇臂的角度,还要明确连杆的长度,之后用纸板快速进行验证。
3. 安全方面需留意,舵机在通电之后,若出现堵转也就是卡住不动的状况,会迅速发热,切不可用手强行去阻止摇臂转动。
只要你拥有一个舵机,还有一块电池,以及一点点手工材料,便能够使得原本处于静止状态的“活”起来。去选择一个自己最感兴趣的项目,进而开始动手做吧。























