



























TECHNICAL SUPPORT

发布时间: 2026-04-29
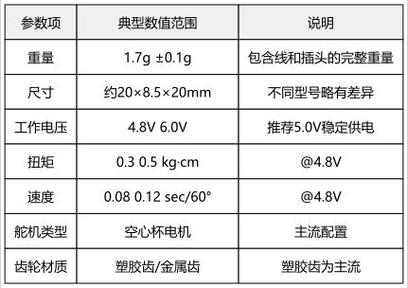
9g舵机,说的是舵机自身重量大概为9克,属于按重量分类的微型舵机规格,不是扭矩或者电压参数。在航模、机器人、DIY电子制作等领域,9g舵机是很常见的微型舵机规格之一,它因体积小、重量轻、功耗低从而广受喜爱。
重点明晰:众多刚开始接触的人错误地认为“9g”便是去指代扭矩的大小,然而实际上它仅仅是用来表明在舵机自身的重量大概是9克。9g舵机的扭矩一般是处于1.5 2.0 kg·cm(在4.8V 6.0V电压的状况下)伟创动力,具体的扭矩是由内部齿轮的材质以及电机的性能所决定的。
塑料齿(POM塑胶),其采用标准9g舵机配置,具备重量轻的特性,同时成本也低,适用于轻负载场景,像是小型飞机的舵面,以及机械手的关节。
金属齿,其重量往11克至13克之间进行新增,扭矩层面提升幅度大概在30%,具备耐磨损的特性,适宜机器人行走机构所处、存在需要频繁做出动作情况的场景。
混合齿:末级为金属齿、前级塑料齿,平衡成本与耐用性
举例诠释:有一位热衷于自己动手做东西的人,在打造微型机械臂之际,最开始选用的是带有塑料齿的9g舵机,然而过了两个月之后,出现了齿隙的状况。随后将其更换成了相同规格的带有金属齿的9g舵机,自此之后已经正常运转了一整年,期间没有出现任何故障。
9g舵机采用PWM(脉冲宽度调制)信号控制,标准参数如下:
信号周期:20ms(50Hz)
高电平脉冲的宽度,处于500微秒至2500微秒的范围,其中常用的是900微秒到2100微秒。
对于角度对应而言,900微秒所对应的角度是0度,1500微秒所对应的角度是90度,2100微秒所对应的角度是180度。
1. 直流微型电机(核心动力)
2. 减速齿轮组(塑料或金属)
3. 控制电路板(含电位器反馈)
4. 输出轴与外壳
5. 电位器(角度位置检测)
控制板对PWM信号予以接收,将其与电位器当下所处位置来进行比较,以此驱动电机实现正反转,借助齿轮减速把扭矩予以放大,使得输出轴运转至目标角度,电位器反馈形成闭环从而锁定。
下述案例予以说明:于某高校举办的机器人竞赛里,有一支队伍在所使用的机械手抓取关节处,运用的是金属齿9g舵机,该队伍完成了2000次抓取测试,期间并未出现故障;然而,另外一支队伍运用的是塑料齿版本,在进行了300次抓取测试之后,出现了滑齿的情况。这表明在负载频繁出现的场景当中,选用金属齿。
1. 误区一:认为9g舵机扭矩相同
一是,塑料齿的重量范围大概在一点五至一点八千克厘米 ,二是,金属齿的重量范围可达二点零至二点五千克厘米,两种情况均为事实。
2. 误区二:直接用单片机IO口供电
要明确喔,9g舵机堵转的时候,电流程度能够达到0.8至1.2A,是一定要采用独立电源的,像5V BEC或者稳压模块这样的。
3. 误区三:忽略脉冲范围差异
存在这样的情况,部分这样的舵机,其使用的范围是500到2500μs的全范围,跟900到2100μs的情形是不兼容的。
电压适配方面,要去确认工作电压,大多数的9g舵机,其最高工作电压是6.0V,要是超过这个电压,那么电路板就会被烧毁。
负载方面存在限制,对于塑料齿而言,其连续负载的情况是不超过1.0kg·cm ,而金属齿的连续负载伟创动力舵机,不超过1.8kg·cm。
信号隔离,电机启动之时所产生的反向电动势,存在干扰单片机的可能性,在此建议加装光耦隔离。
角度限制:标准版转动范围约120°,强行机械限位会损坏齿轮

9g舵机名为微型舵机,其命名依据是重量9克,并非扭矩参数来定标准规格,它的标准扭矩大概在1.5 2.0 kg·cm,工作电压范围是4.8 6.0V,借助20ms周期的PWM信号来控制其作0°到180°的转动,塑料齿版本适用于轻负载场景,金属齿版本适用于频繁动作或者受力较大的应用。
1. 选型三步法:
测一测安装的空间,看一看22.7×12.5×26.9mm这个尺寸到底合不合适 ,这是第一步。
第二步,进行负载扭矩的计算,做出选择,要选择塑料齿,这种塑料齿的扭矩范畴是小于等于一点五千克厘米,或者选择金属齿,此种金属齿的扭矩范畴是大于等于一点八千克厘米。
第三步:核对电压,确保电源输出稳定5V/6V,电流≥1A
2. 采购必查参数(向供应商确认):
□ 实际重量(含线)
□ 额定电压与扭矩曲线
□ 齿轮材质(塑料/金属/混合)
脉冲信号有两个范围,一个是900至2100微秒,另一个是500至2500微秒。
□ 转动角度(标准120°/180°/连续旋转)
3. 首次使用测试流程:
① 单独供电(5V/1A),不接负载
② 发送1500μs脉冲,确认舵机臂在中位
③ 逐步改变脉冲±100μs,观察转动方向
④ 满载测试前,先空载运行5分钟磨合
参照上述指南,您能够依据实际项目所需,精准地挑选并运用9g舵机,防止因对参数产生误解而致使选型出现差错或者设备遭受损坏。























