



























TECHNICAL SUPPORT

发布时间: 2026-05-29
舵机, 这个在机器人里、航模之内以及自动化设备当中到处都能见到的小小部件, 常常会让刚开始学习的人觉得困惑: “它具体是怎样进行转动的? 为何能够准确地停留在某个角度之上? ”本文将会运用最为通俗易懂的言辞还有清晰明了的逻辑, 为你剖析舵机的基本工作原理, 助力你迅速构建起完整的认知架构。
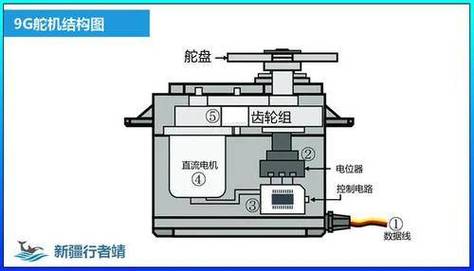
想要明白舵机的工作原理, 得晓得它内部究竟存有什么。平常所见到的舵机, 像标准5线或者3线舵机, 是由以下三大部分组合而成的:
直流电机, 是提供旋转动力源的装置, 其转速较快, 然而所具备的扭矩较小, 故而无法直接应用于针对角度的控制。
齿轮减速结构把电机那种较高速度的转动予以降低, 使之成为速度较低、扭矩挺大的输出状态, 并且与此同时让输出的轴进行运动。
对舵机而言, 控制电路板和电位器有着重要作用, 控制电路板是其“大脑”, 电位器是其“传感器”, 控制电路负责接收外部传来的信号, 电位器能够实时检测舵机输出轴当下所处的角度位置。
常见的案例是, 你所买到的标准舵机, 像是SG90或者这种, 当你把它拆开之后, 会发现看到的三个部分恰恰就是上述所提到的那种结构。其中, 电位器一般是连接在输出轴上面的, 在你转动输出轴的时候, 电位器的电阻值就会跟着发生变化, 进而能够反馈出当前所处的位置。
舵机能够精准地停留在指定的角度位置, 原因在于其运用了闭环控制系统, 这是一个存在着“测量 比较 调整”的循环进程。
1. 接收到来自外部控制器发出的那种用于目标角度的信号, 外部控制器像、遥控器接收机这类, 会发送出一个脉冲宽度调制也就是PWM的信号, 这个信号里的脉冲宽度, 通常处于1ms到2ms之间, 而此脉冲宽度对应着一个目标角度, 像是0°到180°这样的范围。
2. 当前角度进行读取: 控制电路借助电位器, 对输出轴实际角度予以读取。
3. 将目标角度跟实际角度予以比较进行这一比较后针对所出现的偏差诸如目标维度为九十度然而实际维度仅为四十五度这种情形电路会驱使电机朝着正向或者反向实施旋转旋转直至实际角度跟目标角度达成一致。
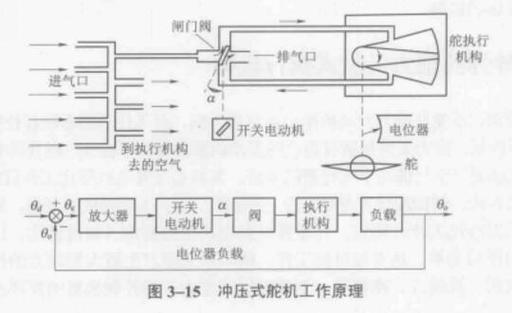
4. 所处位置被锁定呀: 一旦角度达成匹配, 电机就会停止其转动, 舵机便维持在这个位置。要是有外力尝试去推动输出轴, 控制电路会马上检测出来偏差并驱使电机反向去抵抗, 进而产生“保持力矩”。
经常出现的事例是, 你于航模遥控器那儿拨动操纵杆, 舵机马上做出反应转到相应角度, 这属于闭环的具体成效。要是你借助手强行去掰动舵机向外输出的轴, 就会感觉到显著的阻碍力, 这表明控制电路正在对外力进行“抵抗”。
舵机所接收的那个用于控制转向角度的PWM信号, 是极其至关重要的。标准的舵机一般而言呈现那种周期为20ms的方波信号运行状态, 而脉冲宽度跟角度之间所存在的对应关系是这样的:
将脉冲宽度设置为1.0ms , 使其对应0° , 也就是最小角度。
脉冲宽度1.5ms → 90°(中位)
脉冲宽度为2.0毫秒转变为180度, 或者说是最大角度。
舵机的品牌不同, 型号也不一样, 其脉冲宽度与角度的对应范围, 或许会存在着略微的不同, 不过基本的原理是完全一样的。你只要依照规格书所给出的参数, 去发送PWM信号就行。
常见事例: 在你于代码里写下.write(90)之际, 微控制器会自行产生出一个1.5ms的脉冲信号。要是你的舵机不存在反应或者出现抖动, 最为常见的缘由是信号频率或者脉冲宽度不相匹配。
倘若你正处于观看或者着手准备制作关于舵机工作原理的视频教程的状态, 那么以下那五个知识点乃是你必定需要掌握的核心所在:
1. 通过结构识别, 能够一眼就辨认出处于特定位置的电机, 还有那齿轮组, 以及电位器, 另外就是控制电路板。
2. 包含闭环概念, 需理解这样一环套一环的循环, 即从目标角度出发, 到实际角度, 接着进行比较, 而后实施调整, 实现锁定。
3. 对PWM信号进行解析, 要清楚对于角度而言, 1ms所对应的是什么, 1.5ms所对应的是什么, 2ms所对应的又是什么。
4. 接线的规范表明, 那种呈现棕色或者黑色色泽的线乃属于地线这一类别, 此地线被标记为GND, 而那呈现红色色泽的线是电源线范畴, 该电源线标记为VCC, 还有呈现橙色又或者白色色泽的线呢, 则是信号线类型, 其信号线叫作PWM。
5. 常见故障排除: 出现不动的情况, 需检查接线与供电;出现抖动的状况, 是由于信号不稳定或者负载过大;出现角度不准确的情形, 是脉冲范围未校准。
仅仅理解原理还不够,真正的提升来自动手实践。建议你:
开始的第一步, 是去拆解一个价格较为低廉的旧舵机, 仔细地观察其内部构造, 从中找寻到电机, 还有齿轮, 以及电位器。
第二步: 运用开发板写一个简简单单的程序, 使得舵机从0°开始朝着180°的方向来回摆动。或者, 运用STM32开发板写一个简简单单的程序, 使得舵机从0°开始朝着180°的方向来回摆动。
第三步, 去试着借助示波器, 或者是逻辑分析仪, 来查看PWM信号的波形, 亲自用手操作去验证脉冲宽度跟角度的对应关系。
再重复一下核心观点: 舵机的工作原理从本质上来说是一个闭环位置控制系统, 其关键精髓在于先是有PWM信号输入, 接着进行控制电路比较, 然后是电机驱动, 又有电位器反馈, 实现角度锁定这样一个完整链路。要是掌握了这个逻辑, 那么你就能够较为轻松地操控几乎所有标准舵机。
给个行动方面的建议: 当下即刻去拿起一个舵机, 并随即接上3根线, 紧接着编写10行代码以使它能够动起来。实践一回, 要比读足十遍理论更具效果。























