



























TECHNICAL SUPPORT

发布时间: 2026-02-26
哎,你是否也遭遇了这个状况呀?满心怀着欣喜之情,打算把新购置的舵机安装到你的机器人亦或是智能小车上,然而当代码烧录进去之后,舵机要么是完全没有动静,要么就是好似抽风一般毫无规律地一顿乱抖呢这个问题?别着急,这差不多是每一个摆弄的人都会踏进去的坑。实际上弄明白它驱动舵机的原理,就如同学习骑自行车那样,掌握了平衡的诀窍,余下的便是尽情享受飞驰的愉悦之感了。今天咱们就来探讨探讨,怎样运用这块强大的开发板,将你的舵机安排得妥妥当当弄得清清楚楚呀。
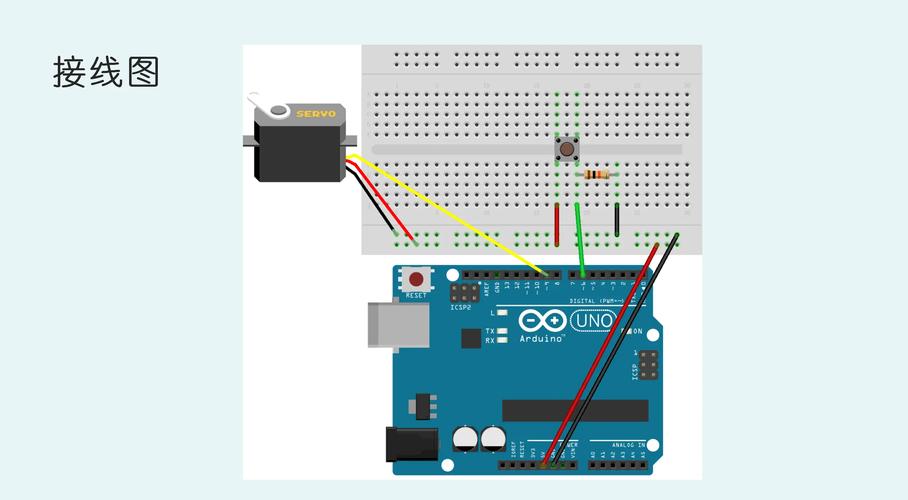
不少朋友一开始就径直用数字引脚去驱动舵机,然而却发觉舵机压根没有任何反应。这实际上是由于舵机所需的“能量”跟 GPIO口所能给予的“能量”绝对不在同一个量级范畴内。F407的引脚是用以传输信号的,其电流极其微小,而舵机内部存在一个电机在转动,乃是需要不小的电流来进行驱动的。
这就如同你妄图借助小水管的水流之力去推动一个大水车,那必然是推不动的。解决办法实际上颇为简易,那便是给你的信号配备一个“放大器”,换句话讲即为舵机驱动板或者一个单纯的三极管开关电路。它所具备的作用是运用F407的小信号,去操控一个能够承载大电流的开关,使得电池的电能能够顺畅地流向舵机。
现在市面上所售的舵机,种类真是繁杂多样,存在有安装着塑料齿的舵机,存在有配备金属齿的舵机,有具备3公斤扭矩的舵机出现,还有携带20公斤扭矩的舵机存在。对于刚刚开始玩F407的那些朋友而言,在挑选舵机这个事情上,可绝对不能仅仅单纯依据舵机的外观颜值来抉择。要去查看你所使用的电源状况,要是你采用的是7.4V的电池,那么就一定不要去选择需要4.8V供电的舵机,不然很容易出现烧毁的情况。
,得看你的项目需求,要是做个桌面小机械臂儿,由于扭力要求不算大舵机厂家伟创动力,那么像参考内容里所提及的,那个微型陪伴机器人力控离合舵机EM3,因其尺寸小且重量轻,故而就格外合适。然而,要是你打算做个能够抬重物的机器狗,那就得考虑像高压无刷全铝舵机这样的,它扭矩大且精度高。选舵机这事儿呢,就如同给车挑选轮胎一样,用在什么样的路上,就得搭配什么样的胎。
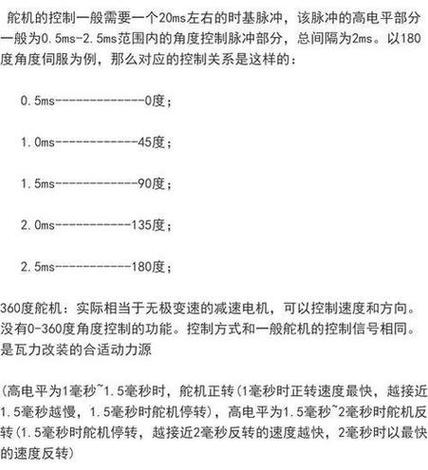
舵机的控制核心乃PWM,即脉冲宽度调制,你能够将其设想为在同舵机悄声细语,每回说话的长短各异,舵机便领会为不同的指令,标准舵机通常要求20ms作为一个周期,其中高电平的持续时长自0.5ms至2.5ms,对应舵机从0度转至180度。
对于在之上对PWM进行配置,你得需要运用它的定时器功能,举例来说,你能够采用TIM2或者TIM3当中的某一个通道进行相关操作,设置预分频器以及自动重装载值,将定时器的时钟频率调整为50Hz,也就是周期为20ms的情况,随后通过对比较寄存器的值加以修改,精准地控制高电平的脉宽,比如设置成1.5ms,如此一来舵机便应该转动到90度的中间位置了。
光能致使舵机转动这还不足够,我们所需求的乃是“顺滑”以及“精准”。要是径直使舵机由0度即刻跃至180度,不但看上去显得生硬,而且还会对机械结构造成冲击。解决办法是增添一个“渐变”的控制。并非直接给予目标角度,而是让舵机一步步地行进过去。
在具备F407的代码范畴内,你能够撰写一个简易的for循环,或者于定时器中断之中,促使当前角度经由渐次增加或者渐次减少,最终变更至目标角度。举例而言,每历经10毫秒就让舵机增添1度,如此一来舵机便会呈匀速转动状态朝向目的地,看上去就显得高级许多。与此同时,精妙的定时器配置切实确保每个脉宽拥有精准度,舵机自然而然就能够精准无误地指向既定位置。
这是极为平常,却又极易被忽视掉的问题!一旦你致使舵机迅速转动,或者让其承受负载,它便会瞬间从电源汲取大电流。要是你的电源,诸如USB供电或者劣质电池,供电能力欠缺,电压就会被瞬间压低。这一压低可不得了,你的有可能会因欠压而复位,或者舵机控制板上的逻辑电路工作出现异常,最终的结果即舵机疯狂抖动。
其解决办法主要存在两个方面 ,其一乃是采用一个大电容 ,像是470uF或者的电解电容 ,将其并联于舵机的电源两端 ,此大电容宛如一个蓄水池 ,当舵机需求瞬时大电流之际 ,它能够立刻顶上 ,从而稳住电压 ,其二是要保证你的电源自身功率具备保障性 ,比如采用一块较为靠谱的航模电池或者大电流的稳压模块。
碰到问题别犯难,我们依着步骤去“解谜”。第一部伟创动力,先来断定硬件连线状况。信号线连接到对应的引脚位置了吗?电源线以及地线连接得稳固吗?最优选择是借助万用表去测量一下舵机电源端的电压数值,瞧瞧它确切具体为几何。第二项步骤,核查你的PWM参数情况。要是有示波器是最为理想之选,若没有的情形下就在心中核算一回舵机品牌伟创动力,你的定时器配置是否切实真就生成了50Hz的PWM波呢?脉宽范畴是否切实真就涵盖了0.5ms至2.5ms呢?
第三步骤,为软件调试。你能够先撰写一个最为简单的测试程序,于其中让PWM固定输出一个时长为1.5ms的脉宽,以此查看舵机是否停留于90度的位置。倘若舵机停止了,那就表明硬件以及基础配置不存在问题,接着再去瞧你那复杂的逻辑代码。若舵机未停止,便需回头去检查第一步骤以及第二步骤。常常情况下,问题皆是出在一些基础的微小细节之上。
行啦,谈了这么些,从硬件的连接开始,接着到软件的配置情形,然后直至问题的排查状况,想来你心里大概是有了些头绪的。自己动手去尝试一番看看,在碰到舵机出现类似抽风或者是处于不动的那般状况之际,你会率先去检查哪一个环节呢?欢迎于评论区域去分享你的经验或者是困惑之处,也千万别忘了点个赞将这些干货分享给更多一同玩F407的友人!























