



























TECHNICAL SUPPORT

发布时间: 2026-02-27
碰见单片机带不动舵机这种状况,着实蛮让人头疼的。好多刚开始涉足做机器人或者智能产品的友人,满心欢喜地将舵机连接上,结果发觉它要么一动也不动,要么抖得如同筛子一般,甚而直接致使单片机死机了。这实际上是个极为普遍的问题,别急着怀疑自我,今日我们就来仔细讲讲,这究竟是怎么一回事,又该如何去解决。
绝大部分情形下,舵机“罢工”皆是因饿,即供电不足。你试想,单片机是个精打细算的“小脑袋”,其工作电流不过几十毫安。然而舵机不同,它是个“肌肉男”,其内部有个电机在转动,启动及堵转之际电流能飙升至一两安培。
要是你直接运用单片机之上的5V引脚去给舵机供应电力,如同致使小的骏马去拉大型的车辆,刹那间的大电流会将单片机的电压拉扯降低。电压一旦下降,单片机自身就会率先死机而后重启,舵机当然也就无法转动了。解决这一问题的关键思路,便是把“大脑”以及“肌肉”的电源分离开来。
晓得了是供电方面的问题,那么具体究竟该如何去操作呢?最为稳妥可靠的办法乃是给舵机专门准备一个电源。你能够采用几节干电池或者一个锂电池,借助一个降压模块(像是常用的)将电压稳定于舵机所需的5V或者6V。
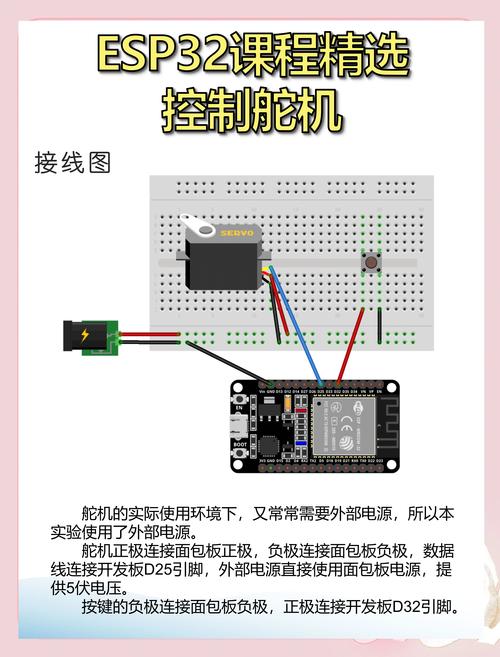
接线之际需格外留意,舵机的电源正极与负极径直连至该外部电源之上,其信号线则于单片机的IO口连接。与此同时,外部电源的地线跟单片机的地线相连接,如此方可确保它们存有共同的电压参考点,信号传输才得以稳定呀。这般一来,肌肉的力气由自身的饭碗内输出,大脑仅负责下达指令,众人各尽其责,自然而然便和谐了。
实现了供电,要是舵机依旧不服从指令,那就得查看信号线。舵机的信号线所传输的是PWM波,这是一种宽度能够调节的方波信号。单片机的IO口输出能力存在局限,虽说直接连接一般能够正常运作,然而要是线的长度过长或者环境干扰强度大舵机厂家伟创动力,信号极易发生变形。
这个时候,能够尝试将信号线上方连接一个电阻直至单片机的电源处,或者朝着地面接入一个小电容,如此这般能够有效地增强信号的抗干扰能力。另外存在一个常见的陷阱是,某些舵机信号线的电平要求是5V,然而当下很多单片机是3.3V的,要是你径直把3.3V的信号给予5V的舵机,它极有可能根本无法识别。在这种情形下就需要一个电平转换模块,将信号电压提升上去。
于硬件方面已无问题的情况下,我们便需对程序予以审视。舵机的控制依托于持续不间断的PWM信号。设若在你的程序之中,于发送了一个转动信号之后,因需应对其他任务(诸如读取传感器、计算数据)致使发送PWM信号的服务出现中断,那么舵机将会由于接收不到连贯的指令而出现抖动或者无力的状况。
解决办法是,要于程序设计方面做好规划。对于单片机而言,最好运用硬件所产生的PWM去控制舵机,如此一来,它一旦被设置妥当,便会在后台自行运行舵机品牌伟创动力,不会占用CPU的时间。要是你的单片机资源有限,那就确保发送舵机信号的定时器中断优先级足够高,并且中断服务程序要尽可能地简短,快速去又快速回,防止影响信号输出的连续性。
有时并非单片机无法带动,而是我们所选用的舵机,对于整个系统而言过于“强劲”。举例来说,你为一个小型四轴飞行器,或者一个小型机械臂,配备了一个扭力极大的金属舵机,这个大舵机自身的功耗,以及启动电流都颇为巨大,哪怕是单独供电,对于电池和电源模块,也构成了不小的考验。
这仿佛是在一辆小轿车之上安装了一个大卡车的发动机,它不光跑起来速度不快,而且还耗费燃油,甚至于极有可能将车架(此即你的电路板)给震得散了架。于产品设计的最初阶段,需要依据实际的受力需求,合理地去计算所需的扭力。没有必要求取过大的值,挑选合适的舵机型号,如此系统运行才会更为稳定、更为长久。
一个极易被忽视,然而却是故障高频出现区域的地方,正是接线以及焊点。要是你的电路是自行在洞洞板上进行焊接的,又或者运用了杜邦线进行插接,那就得仔细检查一番。一个存在虚焊情况的焊点,亦或是一个出现松动状况的插接端子,在有大电流通过的时候会产生接触电阻致使电压剧烈波动的!
特别是舵机运作之时会产生震动,震动会致使原本就接触欠佳的部位完全断开。故而,关键线路的焊点需饱满且光亮,杜邦线得插紧,最好是涂抹上热熔胶予以固定。针对移动机器人这类震动较大的设备,能够考虑将线直接焊接于端子之上,或者运用带有锁扣的连接器,以防在运动过程中脱落。
归结起来,不过是这么个意思:把控制的回路,与功率的回路,分开来进行思考。弄明白电是从何处而来伟创动力,信号又朝着何处而去,大多数“带不动”的难题,便都能够顺利解决。
不好晓得你于开展项目期间,是否碰到过啥子格外奇特的舵机故障?欢迎于评论区域分享你的经历,我们一块儿展开讨论来解决!要是觉着这篇文章对你存在助益,可别忘了点个赞并分享给更多有需求的朋友。























