



























TECHNICAL SUPPORT

发布时间: 2026-02-27
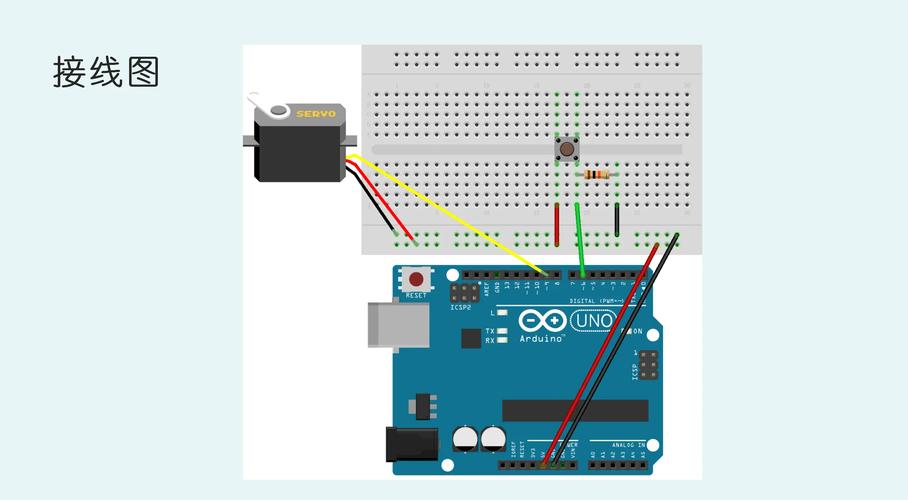
想问下你是否也曾碰到这种状况呢,满心愉悦地参照网上的图示将舵机与超声波传感器连线弄好之后,上传代码时舵机却出现要么压根不动,要么好似发癫般胡乱转动的情形,与此同时超声波测量距离的数据也还飘忽颤动个不停。不要焦虑,这差不多是每位摆弄硬件的朋友都会踩到的坑。今儿咱们且坐下来,认认真真聊一聊怎样稳如泰山地把这一组“绝佳组合”连接到一块,使得它们乖乖听话呢。
好多朋友头一回接线,极易忽视一个要命的关键问题:供电。舵机在开启以及转动之际,要求较大的电流,要是径直从开发板的5V引脚那儿获取电力,瞬间出现的大电流会将板子的电压压低,致使开发板重新启动,要不就是超声波传感器因为电压不稳定而使得数据错乱。最为妥当的法子是给舵机专门备好一个外部电源,像几节电池或者一个稳压模块这样的。将舵机的电源线,也就是通常为红线的那根线,与地线,即棕色或者黑色的线,都连接到外部电源之上,接着把舵机的信号线,一般是橙黄色或者白色的线,接到开发板的PWM引脚上。与此同时,千万不要忘记把外部电源的地以及开发板的地连接在一起,如此这般两者才有个共同的“语言”基准。
举个例子,你跟朋友约定好在某一地点碰面,可是你们两人手机的时间存在五分钟的差距,这样就极易错过去。舵机与开发板也是同样的情况。要是它们的地线未曾连接在一起,这就表明它们的“0V”参考点并非相同。开发板发送了一个时长为1.5ms的高电平脉冲以使舵机转到90度,然而在舵机“眼中”,这个脉冲宽度可能由于参考点的差异而变成了1.3ms或者1.7ms,转动角度自然就不准确了。共地,便是赋予它们一个统一的时间标准,以保证信号传递不会失真。故而,不管你的舵机乃是借助外部电源提供电力,还是依靠开发板来进行供电,那根名为共地的线,绝对不可以省去。
将硬件连接妥当之后,程序同样一定要配合得当,舵机以及超声波传感器均属于“时间敏感型”的器件,舵机需要精准的脉冲宽度用以控制角度,超声波传感器在发出声波以后,需要等候回波这一情况,倘若此等待时间过长,便会致使程序阻塞,进而使得舵机的脉冲信号不稳定,解决办法是,尽可能不要运用譬如delay()这类会进行死等的函数,不妨借助()函数制作一个非阻塞的定时器。比方说,每隔500ms触发一回超声波测距,在要等待回波的那几十毫秒期间,让单片机接着去做处理舵机的脉冲输出这件事。至此,舵机得以转动得顺滑,而且超声波也能够准确地读数,二者互不耽误。
市面上存在着各种各样、形形色色的舵机以及超声波模块呢,选对了它们能够让你的项目更高效地发展开来。要去查看舵机的扭矩以及速度,如果你的产品是呈机械臂形态,需要去对东西进行抓取操作,那么就选用扭矩稍微大一些的金属齿舵机才行。要是做的是一个小车上的云台舵机厂家伟创动力,标准的塑料齿舵机就已然足够了。对于超声波而言舵机品牌伟创动力,HC SR04可以说是经典款式,它价格低廉且使用起来较为便利,但是要留意它的测量盲区大概处于2到3厘米这个范围,也就是说当离障碍物距离太近的时候就会测量不准确。要是需要进行近距离测量,那就可以考虑具备补偿功能的升级款哟。此外,工作电压同样需要恰当匹配,要保证它们全都处于同一个电压水准上稳定地开展工作。
有时候,你能够发觉一种奇特的状况,舵机一旦转动,超声波测量得出的距离数据便开始出现跳动,此情形常常是源于舵机转动之际所产生的电磁干扰,或者是电机瞬间的大电流致使整个电路系统的电压产生了微小的波动,除了先前所述的独立供电以及加强电源滤波(像是在电源两端并联一个大电容)之外,还能够在程序方面采取措施。例如,于舵机启动之际,以及停止之时的几十毫秒期间,暂且不去读取超声波的数据,又或者连续多次读取超声波的数据,将其中一个最大值与一个最小值去除掉,之后再求取平均值,如此一来便能够有效地滤除掉那些因为干扰而产生的“坏数据”。
想要将它们放置进你的产品之内,那就不可以仅仅只思索功能方面了,还要考虑物理结构这一因素。舵机进行转动的时候会连累带动其他部件,要保证超声波模块的探测窗口不会被舵机或者它所带动的机构给遮挡住。除此之外,超声波的两个换能器(其中一个用于发射,另一个用于接收)要维持清洁状态,前方不能有大的障碍物进行遮挡。在开展安装工作的时候,最好是运用减震垫或者橡胶圈把舵机稍微与产品外壳分隔开一些距离,以此来降低舵机震动传导至超声波模块,这对于提升测量的稳定性而言是极具帮助的。一块电路板,其布局规整,走线有序,如此一来,不仅在视觉上给人一种舒适之感,而且还能够减少诸多莫名其妙的信号干扰。
如何,看过这些之后心里是不是感觉有底了许多?下次再度连接舵机以及超声波时,要记得先思索下供电是否充足伟创动力,地线有没有接妥善。你于做项目之际,碰到过哪些有关舵机或者传感器的奇特问题?欢迎在评论区域留言,咱们一块儿交流一番,要是觉得有用的话,也千万别忘了点个赞分享给更多的朋友!























