



























TECHNICAL SUPPORT

发布时间: 2026-02-28
你可曾碰到过这般情形:满心欢悦地为自身的机器人项目配备好了舵机,一旦接通电源,结果它要么颤动得如同筛子一般,要么转动起来好似慢悠悠的蜗牛,全然抵达不了你所期望的成效?诸多时候,这实际上并非舵机自身的质量缘由,而是你遗漏了一个极为关键的参数——舵机工作频率。简要来讲,工作频率便是控制信号每一秒钟刷新的次数,它直接决定了舵机的响应速度以及运行的平滑程度。要是这个没选对或者没调好,你的项目表现可就真要大打折扣了。
这听起来稍带些专业性质的词汇,实际上并非难以被理解。你能够将舵机视作一个十分听从指挥的士兵,然而控制信号乃是依照长官所发出的指令。舵机工作的频率,仿若仿佛长官于一秒之内发出相应指令的次数。频率处于50Hz 的状态,那就意味着长官在一秒的时间之中喊了50次“向左转、向右转”的完整表述。指令发送得越是频繁,士兵所做出的动作调整就会越快、并且越具连贯性。对于舵机来讲,这样的频率决定了它是不是能够快速并且精准地回应你的控制要令,简直是它“指哪打哪”得以达成的、极其起到关键作用的因素。
那情形就如同你让一个已然习惯了聆听慢节奏口令的士兵,突然间去聆听一个快节奏口令,他必定会变得手忙脚乱,动作根本跟不上。要是你的控制频率过高,超出了舵机自身所能承受的范围,舵机就会因为信号过载而出现“抽搐”现象、产生抖动、进而发热,甚至会直接“罢工”。相反地,如果频率过低,舵机的反应就会慢上半拍,动作看上去一顿一顿的,尤其是在需要进行平滑运动的机器人腿或者机械臂上,会显得格外僵硬。
这个问题被问得相当棒,答案实际上就隐匿于舵机的说明书之中!每一家舵机厂商当在开展产品设计之际,皆会标定一个被推荐的工作频率范围,像极为常见的50Hz至333Hz。你首要需要进行的第一步便是寻觅到这个参数。要是确实寻觅不到,能够先从一个处于中间的数值,例如100Hz着手尝试。接着借助你的控制器(诸如或者树莓派)缓缓地向上或者向下加以调整,与此同时留意观察舵机的运行状态舵机品牌伟创动力,直至它转动得最为平稳、噪音最小的时候为止。
区别可不小呢!比如说,这就好似老式收音机跟数字音乐播放器之间的那种区别。模拟舵机是,只要听到指令就开始干活,它对于频率有着较为严格的要求,通常来讲如果老老实实设定在50Hz左右,它才能够稳定地工作。然而数字舵机内部存在一个小处理器,这个小处理器能够将接收到的低频指令进行“倍频”处理,采用更高的频率去驱动电机,那种更高的频率例如300Hz左右。所以数字舵机能兼容的频率范围更为广泛,在高频的情况下也能够保持很大的扭力以及很高的精度,当然其价格也会贵上一些。

这件事全然取决于你运用它去做何事。做机器人关节,像双足或者四足机器人,要求动作得流畅自然,那便需要相对较高的频率,即100Hz至300Hz,借助数字舵机的高响应性,达成快速且复杂的步态的实现。2. 制作机械臂或者云台:要是你将其用于夹取物品或者操控摄像头的角度 ,对于平滑度有着较高的要求伟创动力,然而对于极限速度的要求不是很高 ,那么一个具备稳定性 、处于适中范围的频率(50Hz 100Hz)便足以满足使用需求了 ,如此一来还能够降低舵机所产生的发热情况以及功耗。
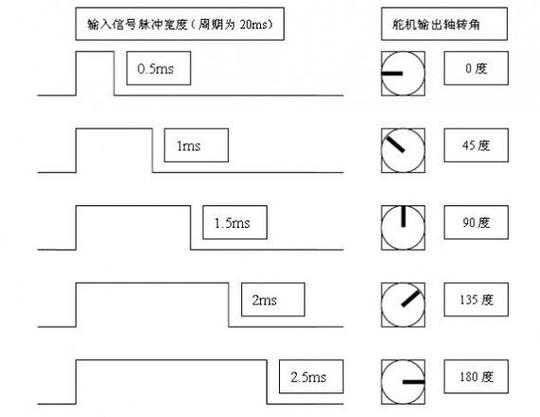
你的掌控装置是“长官”,转向装置是“士兵”,它们彼此之间要用同一种“言语”。绝大多数转向装置采用的是PWM(脉冲宽度调制)信号,你的掌控装置能够输出契合转向装置频率需求的PWM波。当下很多微掌控器的库函数都已封装好了,比如的Servo.h库,默认便是50Hz。若你想要使用更高频率,或许得亲自动手编写代码或者挑选更高级的控制板。记好,要确定控制器所设定的实际频率,与舵机所期望的频率处于同一个频道内。
话说回来,调整舵机频率恰似跟舵机展开“交流”,你需凭借它能够领会且感到舒适适宜的节奏予以沟通,弄清楚这一要点,你的机器人方才能够切实地呈现出“动起来如同逃脱的兔子那般敏捷,静止时宛如未出阁的女子那般安静”的状态,不知你当下正在进行的项目当中舵机厂家伟创动力,选用的是模拟舵机还是数字舵机?在调试频率过程里有没有碰到什么稀罕古怪的棘手问题?欢迎于评论区之际拿出个人掌握的经验分享一番,以便大家一块儿展开交流并取得进步!要是感觉这些内容颇具价值的话,可千万不要忘记点赞之后分享给更多热衷于玩机器人的伙伴!























