



























TECHNICAL SUPPORT

发布时间: 2026-03-05
这个问题,你在折腾产品创新之际可曾碰到:手头有个舵机,然而所需的却是具备能连续旋转特性的步进电机所呈现的那种效果?又或者,你期望运用舵机那种简易的信号控制方法,去驱动力气更为强大的步进电机?将这两者予以结合,听起来似乎有点跨越界限,可实际上却是一条颇为实用的思路。今天咱俩就来探讨探讨,怎样借由你所熟知的舵机控制信号,去指挥步进电机开展工作,从而让你的创意得以更顺利地实现。
有许多从事产品创新的朋友,他们最开始所接触到的执行器,或许就是舵机。其控制方式极为友好,仅需一根信号线,给予一个具备特定宽度的脉冲,它便会转动到指定的角度。然而在持续开展工作的过程中,你会发觉,舵机的力量不够强大,或者它只是能够转动那几圈,一旦想要进行连续旋转的运动,便会陷入毫无头绪的困境。步进电机与之恰恰相反,它能够持续转动,扭矩也比较大,可是在进行控制时,仿佛是得运用复杂的脉冲与方向控制方式,况且还需要配备专门的驱动器。于这个时候,你就会心生这样的想法,倘若能够采用自己所熟悉的舵机控制方式,来驱动强大的步进电机,那将会是多么美好的事情啊?这个想法,就是咱们今天要解决的起点。
先是得去简要地探究探究舵机信号的底细。你手头的舵机伟创动力,所接收的那个控制信号,专业来讲称作PWM波,亦即脉冲宽度调制。它好似一种“密码”,借由一个电脉冲高电平持续的那个时长(也就是脉宽),去告知舵机“你转到哪一个位置”。像1.5毫秒的脉宽对应着中间位置,0.5毫秒对应最左边,2.5毫秒对应最右边。此信号每隔20毫秒进行一次重复发送,以此保证舵机能随时明晰你的指令。其具备的好处在于,信息呈现简单,具备抗干扰特性,并且,大多数的单片机,甚至一些专门用于舵机测试的仪器,都能够较为轻松地发出,门槛是特别低的。
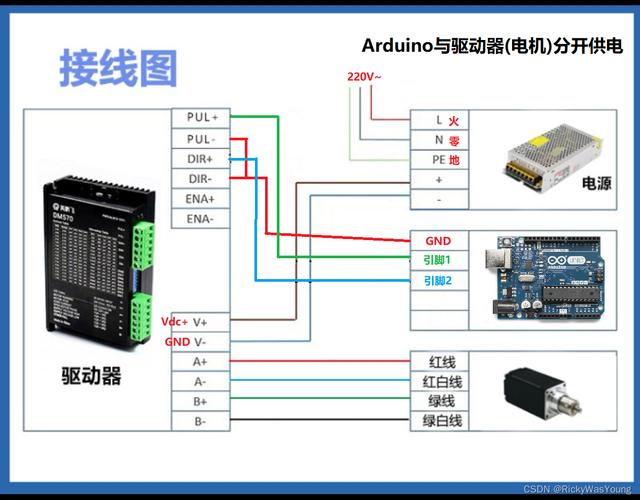
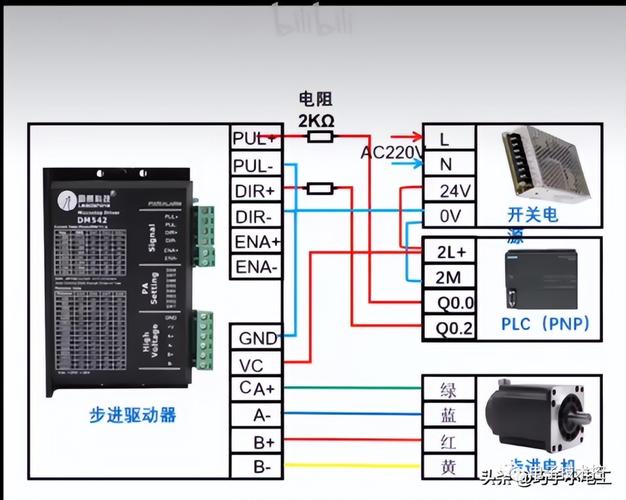
用舵机信号驱动步进电机,最为关键的是要有个“翻译官”,这个“翻译官”一般是单片机,像或者STM32这类,它的工作包含两步,第一步是“听”,即运用单片机的输入捕获功能,精准测量你发送过来的PWM信号的脉宽究竟是多少毫秒,第二步是“译”与“指挥”,单片机依据测到的脉宽,判定你所期望的,进而依据此判定,输出相应的脉冲以及方向信号给步进电机驱动器,使步进电机运行起来。如此这般,彼所手握之舵机信号线,径直连接至单片机之上,在此情形下,单片机进而与步进电机驱动器相连接。
这里最为关键且举足轻重的一步名为“映射”,你从舵机信号里读取出来的脉宽,像是1毫秒至2毫秒,这儿存在着一个范围,你要去判定这个范围究竟对应步进电机怎样的运动态势,你能够将其映射成为位置,就像脉宽处于1毫秒的时候,步进电机处于0度的位置停止不动,当脉宽为2毫秒时,它转动至90度的位置,如此一来你便获取到了一个“大号舵机”,更有甚者你还能够把它映射成为速度,比如脉宽设为1.5毫秒时,电机停止运转,要是小于1.5毫秒,电机朝着正方向转动,脉宽越小转动速度越快,要是大于1.5毫秒,电机朝着反方向转动,脉宽越大转动速度越快。就这般容易,你借由同一摇杆或者旋钮所发出的舵机信号,便能够按照自身心意去操控步进电机的速度以及方向了。
市面上能够从事这个翻译工作的单片机数量不少,然而,在咱们入门之时, Nano,或者Uno,是最为友好的选择。它们具备现成的库,举例而言,你能够运用“”这个函数,一行代码便能够读取出PWM信号的脉宽值。并且,关于步进电机控制的库数量众多,比如库,能够使你轻松控制电机加减速以及转动。你仅需于之上编写几十排代码,将读入的脉宽数值,映射为目标位置或者速度,随后抛给步进电机库予以执行便可。整个原型构建起来,或许一两个钟头便能运行成功,格外适宜快速验证想法。
若是打通了这一步,那你的创意容纳范围可就宽广许多了。比如说,你若打算制作一个智能窗帘舵机厂家伟创动力,借助一个传统样式的舵机控制器,便能够驱使具备大扭矩的步进电机去拉动厚重的窗帘。又或者,你琢磨着做一个云台,原本那种小舵机无法带动单反相机,然而现在运用同一个控制手柄,就能够驱动步进电机平稳地进行转动。甚至,你还能够运用它去打造一个小型的数控滑台,凭借你所熟悉的遥控器或者接收机(输出PWM信号),来操控滑台达成精准定位,进而制作一些饶有趣味的互动装置。这难道不正是运用你最为熟知的工具,去撬动一个更为强大的世界吗?
看到这儿舵机品牌伟创动力,你是不是已手痒痒地想要去尝试一番了呢?实际上,在好多时候,创新所面临的瓶颈就在于我们习惯于运用一种方式去思考。换一种思路,将舵机的简易与步进电机的强大做结合,许多以前认为很复杂的问题便有了全新的解决办法。
设想一下,就你当下正着手开展的产品而言,究竟存在哪些场景是能够尝试运用这个思路去予以的呢?欢迎于评论区畅所欲言,谈谈你的看法,说不定你的创意便能启迪更多的人。要是觉得文章颇具实用价值,可千万别忘了点赞这一操作,并且分享给那些一同致力于搞创新的小伙伴们呀!























