

























TECHNICAL SUPPORT


-
{notrans}
{/notrans}
- {notrans} China-中文简体 {/notrans}

发布时间: 2026-03-07
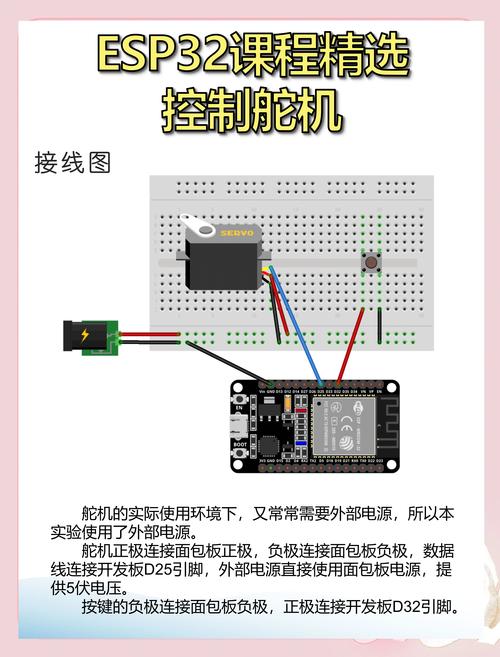
确实是真的而言,自身去开展舵机控制实验,踩坑的状况简直令人难受想哭。明明是依照网络上的教程一步一步去做的,然而结果却是舵机要么抖动得如同患有帕金森似的,要么干脆直接停止运转,处于“罢工”状态。经过几个晚上不停地折腾,才终于摸索清楚,原来是控制信号、电源以及机械安装这几个关键要点没有处理正确。就在今天,将我这几天所经历的惨痛经历进行整理,确保都是实实在在有用的内容,助力你减少走弯路的情况。
新手极易碰到的难题之一是舵机抖动,通常得把这问题归咎于控制信号不稳定,譬如你运用的PWM波实施控制,要是代码里运用了delay(),就极有可能致使信号时序不准确,设想一下,你发出口令让人跑步,口令一会快一会慢,人家跑步自然会跌跌撞撞。
法子的解决实际上蛮简易儿➡️ 其一,瞅瞅控制板的晶振亦或时钟源是不是精准无误,以定时器中断生出PWM信号为佳,而非简易的延时函数。其二,保证信号线离如电机驱动板这般的强干扰源头甚远,加个磁环或者缩减信号线长度此种办法可尝试。
处于堵转状态下的舵机,其电流在瞬间能够飙升至好几安培,举例来说,像这种具备高压大扭矩特性的舵机,其堵转电流能够达到2.5A。倘若你选用普通的7805这种线性稳压电源,一旦出现堵塞转动的情况,电压就会下降,舵机无法获取到充足的能量,情况较轻时会显得无力,情况严重时则会致使控制板被烧毁。
因而选择电源之时要预留足够的余量➡️其一,运算出你全部舵机一同运行时的最大电流,接着在此基础之上乘以一点五倍➡️其二,倘若你所使用的是多轴机器人,强烈建议将舵机与控制板分开供电,只需共地便可以➡️其三,购买电源之际查看一下是否具备短路以及过载保护功能,这能够挽救你的舵机一命。
好些人弄不明白模拟舵机跟数字舵机之间存在何种差别。简而言之,比如说模拟舵机像M0200,好似一个老实巴交的人,一旦你给予一个信号,它就转动一下,要是不给信号,它便停歇着。数字舵机内部安装了微型处理器,能够更为快速地处理信号,使得它更具力量、更为精准。
我个人经由亲身体验所得到感觉到的情况是,其一,要是你仅仅只是去制作一个结构简易的遥控小车或者小型的普通玩具,那么模拟舵机便已能够满足所需,而且此类舵机其价格方面相对较为低廉。其二,然而要是你的相关项目对于舵机有着快速做出反应、频繁进行启动与停止,又或者是对其具备要求颇高的保持力量的需求,举例来说像机器人的手臂关节这种情况,那么就得使用数字舵机才行,恰似这种带有TTL协议的数字舵机,它还能够反馈角度,使用起来会非常便利。
明明已给出了与之对应的PWM占空比,然而舵机却就是无法转到相应位置,或者是在极限位置出现卡住的状况。针对这个问题,通常来讲存在两方面的原因:其一,你所给予的PWM脉宽范围或许并未精准对准舵机的可转动范围,其二 关于机械结构方面则可能存在限位。
进行排查的步骤是十分容易的,,使用示波器或者逻辑分析仪去查看你实际输出的P波形的脉宽究竟是处于何种数值状态伟创动力,典型的舵机其0度所对应的是0.5ms或者1ms脉宽舵机品牌伟创动力,而180度所对应的脉宽则是2.5ms或者2ms。,倘若属于机械限位状况,千万不要强行去掰弄,得把舵机臂拆卸下来,将安装位置调整妥当之后再重新装回去。来看,有些舵机是需要先用特定的指令校对校准一番的,要记得去查看说明书。
选择舵机之际,你会发觉电机类型存在差异。诸如这般所采用的是空心杯电机,它转动起来格外顺滑,响应极其迅速,并且由于不存在铁芯,所以没有齿槽效应,在低速状态下特别稳。
我的提议十分径直➡️ 其一,要是你打算去做云台或者相机稳定这类对于微调和顺滑度有着极高要求之事,那就毫无疑虑地选择空心杯舵机。其二,要是你的项目主要是依靠大力来创造奇迹,需要去承受冲击,像是机械臂抓取重物这种情况,反观普通的高压铁芯电机舵机比如反倒更具耐用性。其三舵机厂家伟创动力,在预算宽裕的情形下,无刷舵机乃是未来的发展趋向,具备使用寿命长以及效率高的特性。
目前,舵机已不再局限于三根线,当下已存在许多协议,例如伟创动力所具备的PWM、RS485、TTL、CAN等各类协议。其中,PWM最为简易,适宜用于单机控制。而TTL和CAN这类属于数字协议,它们能够达成一总线控制多个舵机的目的,并且还能够将温度、电压、角度数据读取回来。
依据需求进行选择,,若仅仅只需操控 两三个舵机,并且控制器接口数量充足,那么利用 PWM 设置最为简便,代码编写亦轻松。 ,要是面临舵机数量超标五个,或者开展具备复杂性的联动与状态监测任务,例如打造一个多足控制机器人,那么必然得运用 TTL 或者 CAN 了,如此不但能够极大程度地简化接线流程,而且凭借通讯获取舵机实时动态的信息,达成闭环控制的目的。
到底给你留个这么个问题:你在进行舵机控制操作的时候,所碰到的最为令人头疼的那个问题究竟是什么?有没有出现过那种舵机发热过度严重的状况?欢迎于评论区域去分享你的那种“翻车”经历,要是觉得这篇文章具备一定用处的话,可千万别忘了去点赞并且分享出去,从而让更多的朋友能够看到!






















