



























TECHNICAL SUPPORT

发布时间: 2026-03-12
弄舵机与超声波传感器相连之际遭遇卡顿啦?别着急,此情况实际上并不复杂,只是在最初碰触之时,因线路众多而感到些许困惑。众多刚着手开展创客项目或者产品原型工作的友人都曾在此处犯难,我当初亦是如此。今日让我们将这一情况剖析清楚,使你不但晓得如何连接,而且能够明白为何这般连接,往后自己也可以触类旁通。
得想清楚它们二者究竟是何种关系,舵机宛如机器人的手以及脚,承担着使机器人动起来的职责,超声波传感器恰似机器人的眼睛,肩负着测量距离的使命。我们所要达成的,乃是运用“眼睛”所获取到的信息,进而去指挥“手脚”展开行动。最为常见的情形便是打造一个智能避障小车,超声波一旦察觉到前方存在物品阻挡,便会告知舵机“嘿,转个弯”,舵机一旦执行相应操作,车子便可绕开。一旦这二者配合得当,你的项目便具备了最基本的智能。
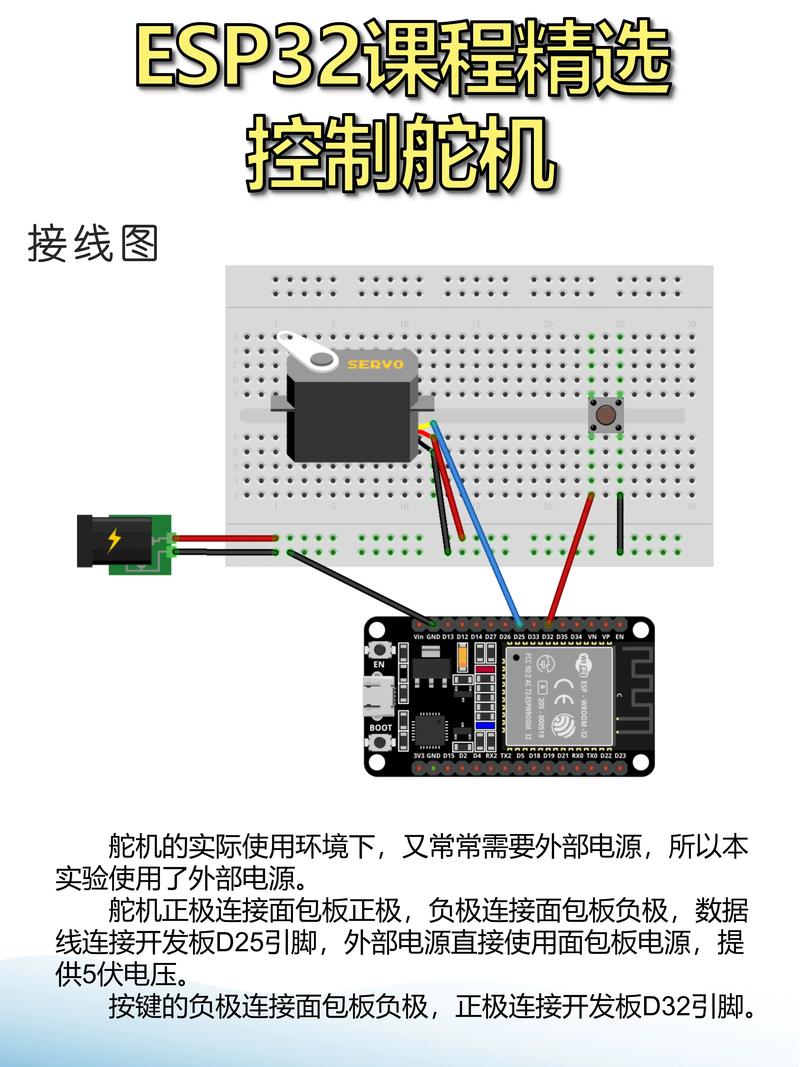
就这一步而言,它可是重中之重的关键步骤,同时,这还是新手极易陷入烧元件困境的大坑所在。舵机这物件,堪称是个耗电大户舵机厂家伟创动力,运转起来的时候,其所耗电流可不是个小数目,尤其是那种具备大扭力的金属舵机。超声波传感器虽说相对比较省电,然而,也绝不能随意将就了事。我在此给出的建议便是:千万不要想着贪图省事,就直接把它们通通都插在的5V引脚上! 正确的操作方式是,将舵机的电源线(一般情况下是红色的那条)以及地线(呈现棕色或者黑色的),单独连接到一个外部电源之上,像是电池或者稳压模块这类的电源。接下来,将超声波传感器的VCC引脚以及GND引脚,连接至开发板对应的5V引脚以及GND引脚之上。最终,要牢牢记着,把全部设备的用于接地的GND引脚,统统连接在一起,因为这是它们能够彼此通信,如同使用同一种语言进行交流的根本基础所在。
把电源处理好了之后,信号线的处理就变得容易许多了。舵机的信号线,一般情况下是黄色或者橙色的那种,要插在开发板的PWM引脚上,比如说像 Uno开发板上的9号引脚抑或是10号引脚,是比较常用的。超声波传感器存在两个信号脚:一个是Trig,也就是发射触发的那个脚,另一个是Echo,即接收回响的那个脚。Trig这个脚随便找一个数字引脚就可以了,而Echo这个引脚的设置就需要特别留意一下了。尽管使用普通数字引脚也是可行的,不过要是为了让测距能够更加精准,特别是当你要进行精细控制操作的时候,建议把Echo这个引脚插在支持中断功能的引脚上。这个细节很多人不讲,但对追求稳定性的项目来说挺重要的。
线已经连接好了,然而,脑子里所具备的逻辑同样也梳理一番。代码绝不能够呈现为毫无条理地一路编写下去伟创动力,一定要具备系统性。我向来习惯于按照这样的方式进行编写:
第一步:进行初始化 令舵机做好准备 使超声波传感器也做好准备 让舵机归至中间位置。
➡️ 第二步:进行测距工作的时候。 促使超声波发出一个声波,并且等待着这个声波回来的情况发生以便展开后续操作,之后再对时间进行换算从而达成距离获得的结果之后用于相关作业。
➡️ 第三步:判断。 比如距离小于20厘米,说明有障碍。
第四步,执行,要是存在障碍,那么,舵机转动到一定角度,比如说左转六十度,以此让小车避开,要是不存在障碍,那么,舵机就恢复到正常状态,继续向前行进。
这样一步接一步,程序跑起来就清晰多了,出问题也好找原因。
你是否遇上过这般状况:舵机一旦转动。超声波所测的距离便即刻开始胡乱跳动。这便是典型的信号干扰情形。舵机内部的电机在运转之时会发出电磁噪声。进而对灵敏的超声波信号造成影响。解决的办法存在几个方面:其一。于靠近舵机之处给舵机的电源线添加一个几百微法的电容。以此给它“消消气”。其二。使信号线尽可能短。并且让其远离舵机的电源线。其三。要是对实时性的要求并非很高。那么在测量完距离之后、执行动作之前。增添一个几十毫秒的小延时。让信号“冷静”一阵子之后再开展工作。
万事俱备,切不可一开始就要小车到处行进。需要“分阶段进行测试”。其一,先对超声波单独展开测试:编写一个最为简易的测距程序,开启串口监视器,查看当你将手置于前方时,距离数值是否随之变动,是否精准。其二,单独测验舵机:撰写一个令其左右摆动的小程序,瞧瞧转动的角度是否与预期相符。这两个步骤均确认无误后,最终再将它们整合一处。这般做具有的益处在于,倘若最终出现故障了,你最少能够晓得硬件并未损坏,问题必定是出在代码逻辑的协同上,排查的范围瞬间便缩小了。
谈了这么些,往后你拿起烙铁抑或插上杜邦线之际,心里是不是就安心不少了?实际上这些经验都是在一回回“烧糊啦”之后获取的。想问下你,于你的项目之中舵机品牌伟创动力,打算使舵机与超声波共同达成一项怎样有趣的任务?欢迎在评论区讲讲你的创意,要是觉着这篇文章对你有帮助,可别忘了点个赞分享给更多有需求的朋友!























