



























TECHNICAL SUPPORT

发布时间: 2026-03-14
哎,你是否也碰到过这般状况呢,满心愉悦地打算将舵机运用到自身的机器人亦或是小发明之中,然而一旦开启编程软件,面对那些代码刹那间就愣住了。在网上搜索“舵机编程”,呈现出来的信息杂乱无章,要么太过繁杂难以理解,要么太过简易毫无用处。别着急,今日咱们就来谈论一下舵机的编程代码,我会帮你把那些常用且好用的代码片段整理成一份“大全”舵机品牌伟创动力,确保让你看过之后就能着手操作,使你手中的舵机运转起来。
老实讲,致使舵机转动起来这件事自身丝毫不存在困难之处,困难的要点在于怎样促使它依据你的想法精确地进行动作。众多初次开始接触的友人,一开始便被那些库函数以及寄存器配置给唬住了。实际上你全然能够换种视角去思索,舵机就是个极为顺从的小跟随者,你仅仅需要运用程序告知它“转动到xx度”或者“以xx速度转动”,它便会依照指令去执行。我们所要达成的,就是把控住这几句关键性的指令。如同平台,仅仅几行简易的代码就能使得舵机开始摆动,这听起来是不是就没那么令人畏惧了呢?
当前在市面上占据主流地位的舵机控制方式主要存在着两种,分别是:PWM波控制以及串口通信控制。PWM控制属于最为传统同时也是最为常见的那种方式,就好比大家平常所玩的小型机器人、遥控,基本上全都采用的是此种方式。它借助发送不同宽度的电脉冲去对舵机的角度予以控制,具备简单直接的特点,而且成本也比较低。而串口控制(例如TTL、RS485)相对来说则要更高级一点,一般会被应用在需要对多个舵机进行精确控制、又或者是需要读取舵机状态(诸如当前角度、温度、电压)的复杂项目当中,像是某些高精度的机械臂或者人形机器人。
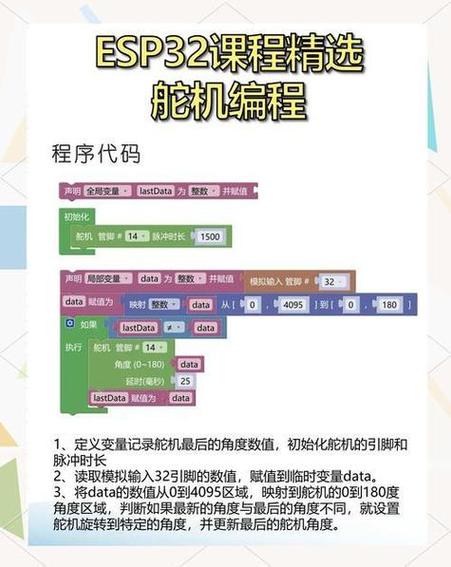
现今咱们开始着手讲述最为简易的PWM控制,在这类常用的控制板之上,编写代码大致就是“分三步进行”,第一步,需要纳入舵机的库文件,就如同代码“# .write(90)这一代码所达成的效果乃是使它转动至90度这一位置。你能够将这些代码放置于loop循环之内,再借助delay延时这个操作,便能够促使舵机于0度与180度之间进行来回摆动的动作了,难道不是相较于想象更为简单吗?
来瞧一瞧,有一个能使舵机从0度转向180度伟创动力,而后又转回去的完整小型示例:
#
Servo ; // 创建一个舵机对象
int pos = 0; // 用来保存角度的变量
void setup() {
.(9); // 把舵机信号线接在9号引脚上
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // 从0度逐步增加到180度
.write(pos); // 告诉舵机转到‘pos’这个角度
delay(15); // 等15毫秒,让它有时间转过去
}
for (pos = 180; pos >= 0; pos = 1) { // 从180度逐步减少到0度
.write(pos);
delay(15);
}
}
倘若你期望你的机器人跳出一支舞蹈,或者令机械臂完成一个复杂动作,单单依靠一个舵机那是远远不够的。控制多个舵机与控制一个舵机,在代码结构方面实际上相差无几,最为常用的办法便是“分时复用”。你能够在程序里为每个舵机设定一个目标角度,接着在主循环里持续不断地对它们进行刷新。其核心思想在于,不要让程序在某个舵机转动之际“卡住”,而是要使其如同乐队指挥那般,在同一时间关照到每一个乐手。比方说,处于loop函数当中,你能够于每一个时间片段里舵机厂家伟创动力,去更新全部舵机的运行状况,如此一来,从宏观角度看上去,它们便是一同进行动作的了。
➡️ 如果想做更复杂的动作序列,用数组来帮忙是个好主意:
#
Servo , ; // 创建两个舵机对象
// 定义一个动作序列,每行是一组角度 (角度, 角度)
int poses[][2] = {{90, 90}, {45, 135}, {135, 45}, {90, 90}};
void setup() {
.(9);
.(10);
}
void loop() {
for (int i = 0; i < 4; i++) { // 遍历所有动作
.write(poses[i][0]);
.write(poses[i][1]);
delay(1000); // 每个动作保持1秒,让舵机转到位
}
}
这是个具备良好性质的问题。针对咱们这些使用者 ,特别是在运用这类处在高级层面的平台进行编程之际 ,所撰写出来的代码基本上呈现出相同的状态 ,皆是运用 write() 函数去操控角度。它们之间存在的差异主要体现在舵机内部的 “脑子” 以及 “肌肉”,之上。模拟舵机是依靠内部的比较器芯片来开展工作的 ,你向它发送一次PWM信号 ,它便会竭尽全力朝着那个角度行进 ;而数字舵机内部存在一颗单片机 ,它处理信号的速度更为迅速 ,并且还能够达成一些高级功能。,尽管你所编写的代码看上去大致相像,然而数字舵机的回应速率以及定位精准度一般而言会更为出色,在把玩时的手感也会更加良好。
要是你着手玩那种更具高级性质的串口舵机,像参考当中所提及的带有TTL或者RS485的型号,编程的方式的确会出现一些变更。在这个时候已然不是单纯的PWM波了,而是好似两个聪慧之人展开对话那般,借助一串指令去进行沟通。你得经由串口传送特定格式的数据包,告知舵机“你是哪一个”(ID号)、“去做什么”(诸如转到多少度)。此种方式的益处极为显著,一根线便能操控一整串舵机,还能够随时询问它“嘿,你此刻处于什么位置?”,又或者“哥们儿,你的温度是不是有点偏高啊?”。”。
➡️ 一个典型的串口舵机控制代码框架大概是这样的:
// 伪代码示例,具体指令需要查舵机手册
void setup() {
.begin(); // 初始化串口,和舵机“通上话”
}
void loop() {
// 发送指令:让ID为1的舵机转到2500的刻度(对应约90度)
(1, , 2500);
delay(1000);
// 发送指令:读取ID为2的舵机的当前温度
(2, , 0);
delay(100);
}
void (byte id, byte cmd, int value) {
// 这里需要按照舵机协议,把id, cmd, value 打包成特定格式的数据包
// 然后通过 .write() 发送出去
}
跟你说了这么多,从最初级的PWM控制,进到复杂些的串口通信,对于舵机编程,你有没有树立起更明晰的概念呢?实际上重点在于依据你计划开展的项目需求,挑选恰当的舵机类型,接着掌握与之匹配的那几行关键代码。仅仅从书本上获取知识终究感觉不够深刻,要透彻了解这件事还得亲自实践才行,赶快拿出你的控制板以及舵机,将上面所列举的示例运行起来尝试一下吧。
你于玩舵机期间,所碰到的最为令人头疼的编程方面的问题究竟是什么,是角度持续不停地抖动不已,抑或是多个舵机之间配合得不够理想,欢迎于评论区留下你的话语,咱们一同展开交流以解决问题,可别忘了点赞并进行分享,从而让更多的朋友能够看到这篇具备干货性质的内容!























