



























TECHNICAL SUPPORT

发布时间: 2026-04-02
通常致使舵机出现“转不动”或者“卡死”这种现象的情况,是由机械、电气以及控制信号这三类故障所引发的。本文是从实际使用场景着手的,能够帮您迅速对原因进行定位,并且给出可以执行的解决步骤。
1. 机械卡阻(占故障案例60%以上)
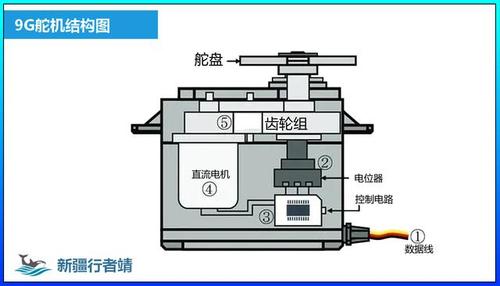
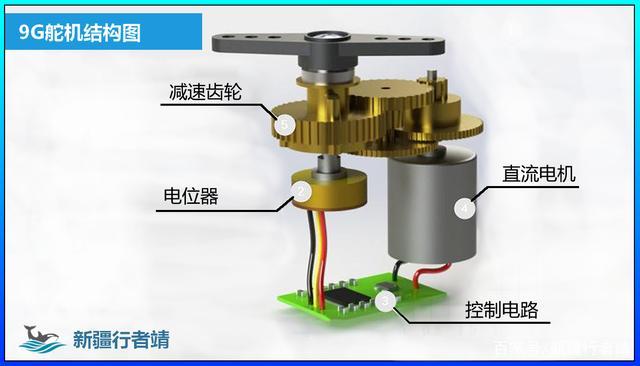
尼龙齿轮或者金属齿轮,在经历过载撞击之后,出现断齿状况,进而牙齿分崩离裂了,最终致使转子被卡死,这就是齿轮损坏。
常见的事例是,有一位航模爱好者,在进行练习降落这个行为的时候,螺旋桨接触到地面的那一刹那猛然冲击舵面,舵机内部的第二级齿轮崩掉了两个齿,紧接着舵臂全然没有办法转动了。
异物嵌入:沙尘、碎屑进入减速齿轮组或输出轴缝隙。
常见情况示例:有一支参与机器人竞赛的队伍,在沙土地面进行调试之后被发现,其肩部舵机转动时阻力极大,将其拆开之后还发现,存在细沙混杂在润滑脂之中从而形成了研磨膏的现象。
输出轴变形:侧向受力过大导致金属输出轴弯曲,与外壳摩擦。
2. 供电不足或电压跌落(容易被忽略的高频原因)
舵机启动的那一瞬间,电流能够达到工作电流的二至三倍的。要是电源,也就是电池或者BEC,不能提供充足的峰值电流的话伟创动力,电压就会一下子降低到舵机欠压保护点以下的,进而致使电机没有扭矩的。
较为平常的事例有,一位自主制作六足机器人的人,运用5V/2A的USB电源,同时去驱动6个舵机,在3个及3个以上的舵机一同开始动作的时候,电压下降到3.8V,然后所有的舵机先是抖动,之后便被锁住了。
导线过细或接插件氧化也会引入额外压降。
3. 控制信号异常
脉冲宽度超出了舵机能够识别的范畴,其标准在500至2500微秒之间,中心值为1500微秒,一旦超出,舵机就会拒绝做出响应,或者仅仅移动到极限位置之后便停止转动。
信号线虚接或干扰导致丢帧,舵机保持在有效位置不动。
4. 电机或驱动电路烧毁
长时间堵转使电机绕组过热烧断伟创动力舵机,或驱动MOS管击穿。
较为常见的案例体现为,某机械臂项目存在编程方面的错误情形,致使舵机朝着超越物理限位的方向持续发送指令,历经5分钟之后,舵机出现发烫状况且永久处于锁死状态。
5. 角度物理限位
在部分舵机之中,其内部存在着机械限位柱,这些限位柱对范围进行了约180°的限制。要是通过连杆机构强行将其拉到限位位置,那么就会直接出现卡住的情况。
按以下顺序操作,可在5分钟内定位多数问题:
对应:
齿轮损坏:更换同规格齿轮组(可购买维修包)。
异物嵌入:拆开用无水酒精清洗,重新涂抹锂基润滑脂。
如果供电不足,那么可以将其更换为输出电流大于或等于3A的BEC,或者使用更高C数的电池,另外,要把舵机线缩短至20cm以内。
信号出现异常状况,需对焊点展开检查,还要更换信号线,要保证控制器PWM的频率是50Hz,也就是周期为20ms。
电机烧毁:更换舵机(维修成本高于新品)。
执行物理限位操作时,要对连杆长度予以调整,还需于程序里设置软限位,此软限位要留出5°余量。
核心观点是,百分之九十的“舵机转不动”故障,都源自可以预防的三种原因,分别是过载冲击,分别包括供电不足,且也包含异物侵入。
行动清单:
1. 将舵机进行安装之际,要保证在其转动的范围以内不存在硬的阻挡情况,并且要去设置电子限位,此电子限位比机械限位少10°。
2. 为之提供能力,此能力是使用稳压电源为每个舵机提供峰值电流≥2A,当多舵机并联时,总电流会累加。
3. 在沙尘或潮湿环境使用后,立即用压缩空气清理舵机输出轴缝隙。
4. 每飞行/运行50小时后,检查齿轮磨损并更换润滑脂。
马上执行:要是您当下的舵机已然转不动了,那就依据上述排查表从“手动扳动舵臂”着手。多数卡死状况只要清理异物或者更换齿轮组便可修复,用不着更换整个舵机。留存本文,往后碰到同类故障时能够快速对照解决。























