



























TECHNICAL SUPPORT

发布时间: 2026-05-02
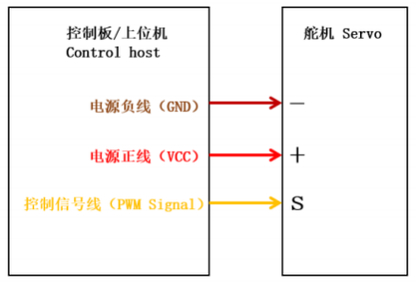
舵机外接的三条线,分别是什么?怎么接?
要是你拿到了一个属于标准范畴的舵机,那便会瞧见它引出了红、棕、橙(或者是黄/白)这三根线。这三条线各自对应着三个那种要正确进行连接的信号,分别是电源正极、电源负极(也就是地线)、控制信号线。只要接错其中一根,舵机就有可能出现不转动、产生抖动的情况,甚至还会被烧毁。
本文依据实际维修方面的案例,以及主流控制器,像、STM32这样的通用标准,来为你完整地拆解每条线的定义,拆解接线规则,还拆解常见错误的解决办法。
案例呈现伟创动力,有一位玩家,把舵机的红色线,错误地连接到了5V信号输出引脚,又将棕色线,连接到了GND,还把橙色线,连接到了VCC。在完成上电操作之后,舵机内部的芯片,瞬间就被击穿了,并且发出了焦味。这属于那种典型的,因为电源与信号线错接,从而导致的损毁情况。
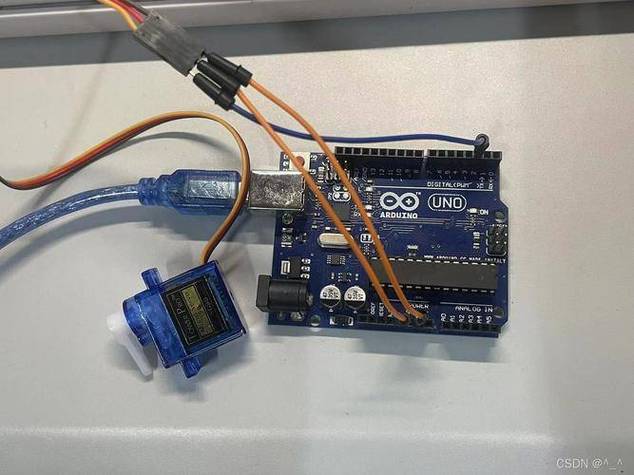
舵机(任意标准型号)
控制器主板(如 UNO)
外接电源(电池盒或稳压模块,5V/1A以上)
公对母杜邦线(3根)
第一步:连接电源负极(GND)
将舵机棕色线 → 控制器GND引脚
目的:先建立公共地,防止电位差击穿
第二步:连接信号线
将舵机橙色线 → 控制器PWM引脚(如D9)
第三步:连接电源正极(VCC)
将舵机红色线 → 控制器5V输出引脚 或 独立5V电源正极
注意:若多个舵机同时工作,使用独立外接电源,严禁从控制器5V引脚取电
排查一,使用万用表去测量红线与棕线之间的电压,其结果处于4.8至6.0V这个范围之内。
排查二:查看控制器的PWM引脚,确认其输出是否正常,此过程可借助示波器或者通过LED来进行观察。
就排查3而言,要去确认,程序里的脉冲宽度范围,这个范围通常是500到2500微秒,此外这个范围应对着0到180度。
格外常见的缘由是,电源容量欠缺,需换用2A以上的稳压电源,而且要于舵机电源引脚处并联一个容量为100至470μF的电解电容。
次要原因:信号线受干扰 → 缩短信号线长度(<30cm),或用屏蔽线
情形是这样,在某机器人项目里,有3个舵机,共同从控制器5V获取电力,致使电压下跌到3.8V,进而舵机一同出现抖动现象。后来改成独立6V/5A供电,之后恢复到正常状态。
原因:长时间堵转或供电电压超过6.5V
做到:马上把电断掉的同时伟创动力舵机,查看机械负载有没有出现卡死的状况;电压需要严密地限定在6.0V这个范围之内。
舵机三条线的黄金法则:
红色 → 正极(4.8~6.0V)
棕色/黑色 → 负极(GND)
橙色/黄/白 → 信号线(PWM)
信号线和电源线绝不能互换,否则瞬间损坏。
1. 接线这一行为开始之前,要运用万用表的蜂鸣档去对控制器之上各个引脚的定义予以确认,特别是GND以及5V这两个引脚。
2. 上电前:对照本文“标准接线步骤”逐项核对,避免凭记忆乱接。
3. 要是需长时间使用,那么就得为每个舵机,在其红线与棕线之间,并联上一个100μF的电容,而且始终都要使用独立的稳压电源。
4. 头一回进行调试:去撰写一个简易的“来回摆动”程序,此程序脉宽是从1000μs变化到2000μs,在确定舵机能依照指令行动之后,再去加载复杂的代码。
遵循上述规则,你的舵机将会稳定地工作数千个小时。要是碰到异常情况,那么请复查红线与棕线的电压极性以及容量。























