



























TECHNICAL SUPPORT

发布时间: 2026-05-20
那种借助蓝牙来对舵机实施控制的情况,属于是把无线通信方面的技术跟电机控制彼此结合起来的一种应用情形,它在机器人、智能家居以及各种各样的自动化项目里有着广泛的运用。在这篇文章当中,会凭借清晰的工作流程方面的图解,去详细地阐发清楚它的核心原理、关键步骤以及常见实现方案,目的在于能够给开发者提供出一条完整的、可以执行的技术实现道途。
发送端(像手机App、电脑那样)借助无线信号,把控制指令传递至接收端(比如蓝牙模块),进而驱动舵机去执行相应动作,这就是蓝牙控制舵机系统的核心所在。其基本工作流程遵循着一个清晰的逻辑闭环。
核心流程图解:
以下五个关键步骤能够将整个流程予以概括,它们之间的逻辑关系呈现于如下图所示情形,(请依据文字阐述構築清晰的思维导图):
1. 操作指令被发起,是用户于控制终端处,像手机App那般伟创动力,进行目标动作的输入,例如转动90度。
2. 无线传输,控制终端借助蓝牙协议,把经过编码的指令数据包予以发送,使其向外传输出去。
3. 指令的接收阶段 , 以及对指令展开解析:那种和舵机控制器相连接的蓝牙接收模块 , 像 、STM32这类的舵机控制器进行连接 , 还有如HC 05 、HM 10这样的蓝牙接收模块 , 它接收到了数据 , 然后把接收到的数据传递给主控制器。
4. 信号生成阶段,主控制器,依据解析出来的指令,进而生成与之相应的控制信号。针对最为常见的PWM(脉宽调制)舵机而言,控制器会生成一个具备特定占空比的PWM波。
5. 舵机进行执行操作,PWM信号朝着舵机被发送过去,舵机当中的内部电路依照脉冲宽度转变为相应的角度或者位置,以此驱动电机达成运动。
常见硬件连接案例:
以 Uno控制器为例:
进行连接时,蓝牙模块,也就是如HC 05这般样式的,其TX相应引脚要跟的RX,也就是引脚0去做连接,而RX引脚则要连接到的TX,也就是引脚1那儿,至于VCC以及GND将连至对应的电源。
舵机(如SG90) 的信号线(通常为橙色或黄色)连接的任意一个支持PWM输出的数字引脚(如引脚9),红色线接5V,棕色或黑色线接GND。注意电源功率,多舵机或大扭矩舵机需外接电源。
硬件选择的匹配性是成功的基础。常见搭配如下:
控制器有,,ESP32,STM32等等。ESP32自身带有蓝牙,能够简化电路。
蓝牙模块,可依据需求来抉择经典蓝牙,像 HC 05,其用于点对点控制,或者是选择低功耗蓝牙,比如 HM 10,它用于低功耗设备。
舵机,要依据扭矩、电压以及尺寸需求来选择,应着重关注控制协议,以此保证与控制器相兼容,绝大多数业余舵机采用PWM协议,有部分高端或总线舵机运用TTL、RS485等串行协议,其编程方式存在差异。
软件层面需要实现两端(发送端与接收端)的编程。
控制器端编程(以 PWM舵机为例):
初始化串口通信(用于与蓝牙模块通信)。
初始化舵机控制引脚,并关联舵机库(如Servo.h)。
在循环中持续监听串口数据。
剖析接收到的资料,比如说,接收到的为字符‘A’,接着调用舵机库函数去施行对应的动作,像是 .write(90);。
控制终端编程(以手机App为例):
可以运用MIT App ,或者使用 ,又或者采用现成的蓝牙调试助手App。
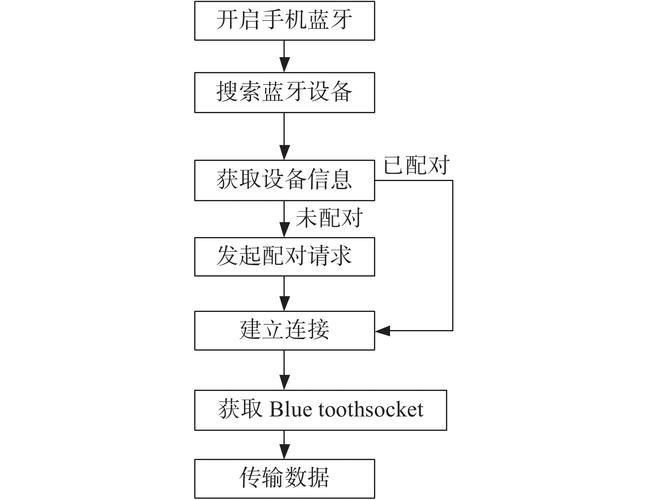
关键功能是,搜寻并且匹配蓝牙装置,在构建连接之后,借由按钮等控制部件发送预先设定的指令字符或者字符串。
在实际开发中,在流程中嵌入调试和容错机制:
进行数据校验时,于无线传输这个环节当中,提议在指令数据包里添加简单的校验和,以此避免因数据出现错误致使舵机胡乱转动。
反馈状态(具备灵活性只不过建议采纳): 能够于该系统里纳入反馈流程,举例而言,当舵机抵达指定地方后,掌控器借助蓝牙回传“已完毕”讯号之时,让流程示意图构建为封闭回路,以此增强控制的可靠性。
进行供电检查时,舵机发生堵转情况之下电流陡然剧烈增加,这是致使系统处于不稳定状态或者出现重启现象的最为常见的缘由。一定要保证电源,特别是外接电源,可供应充足并且稳定的一股电流。
核心观点再次强调:成功达成蓝牙操控舵机的重点在于明白“指令通过无线进行传输,信号在本地予以生成,舵机依照驱动展开执行”这样一个核心流程,并且要保证硬件相互兼容,电源供应充足,程序逻辑准确无误。
行动建议:
1. 踏入标准案例起始之径,达成首次呈现,极为强烈地提议运用 Uno与HC 05蓝牙模块以及SG90/PWM舵机,此为最为经典且资料数量最为丰富的组合形式设置。
2. 依次逐行进行测试:着手编写程序,以此来测试舵机,通过控制器在本地直接进行控制,查看其是否处于正常状态;随之单独展开测试,针对蓝牙模块的串口通信这一方面,检查其是否顺畅无阻;最终完成两者的结合操作。
3. 善于运用工具,运用“串口监视器”这类工具,运用“蓝牙调试助手”这类工具,实时去观察数据的收发情况伟创动力舵机,这属于排查故障最为有效的手段。
4. 随着基础功能得以实现之后进入迭代升级阶段,此时能够去考量增添多舵机控制功能,也能够去看待补充动作序列存储功能,并且还可以思索添加手机姿态控制这样的进阶功能。
总体而言,借助依照上述所提及的流程图以及详细阐释的步骤,你能够以一种系统的方式去构建一个具备稳定可靠特性的蓝牙舵机控制系统。要牢记,对于流程清晰的理解再加上模块化调试,这乃是解决此类嵌入式无线控制问题时通用的法则。























