



























TECHNICAL SUPPORT

发布时间: 2026-05-20
当运用ESP32去对舵机实施控制之际,最为常见的问题便是“舵机不开展工作”或者“工作呈现异常态势”。有好多初学者会碰到接线是正确无误的,程序上传也成功达成了,然而舵机却全然没有反应,抖动极为激烈,要不然就是仅仅转到一处固定的位置这种状况。这些问题一般而言并非是硬件出现损坏,而是由于几个关键的配置出现了错误所致使的。
处于核心之处的结论是,ESP32对舵机实施控制时出现无法正常工作的状况,其中90%的缘由在于供电方面存在不足的情况,或者GPIO引脚的选择出现错误,又或者PWM频率以及占空比的设置并不匹配。只要依照以下所给出的步骤去进行排查,绝大多数的问题都能够在5分钟之内获得解决。
原因是极易被忽略的,ESP32的3.3V引脚当中,最大输出电流仅仅只有约500mA而已,大多数标准舵机比如SG90,还有,在堵转或者启动瞬间的时候,电流能够达到1A至2A,远远超过了ESP32所能够提供给自己的上限金额。
典型的现象是,舵机有时会偶尔动那么一下,出现卡顿情况,显得无力,又或者程序上传之后,舵机能完全处于不动的状态,不过LED 灯或者串口输出却是正常的。
:
舵机供电得借助外部电源才行,千万别朝着 ESP32 的 3.3V 引脚、或者 5V 引脚取用电力呀。
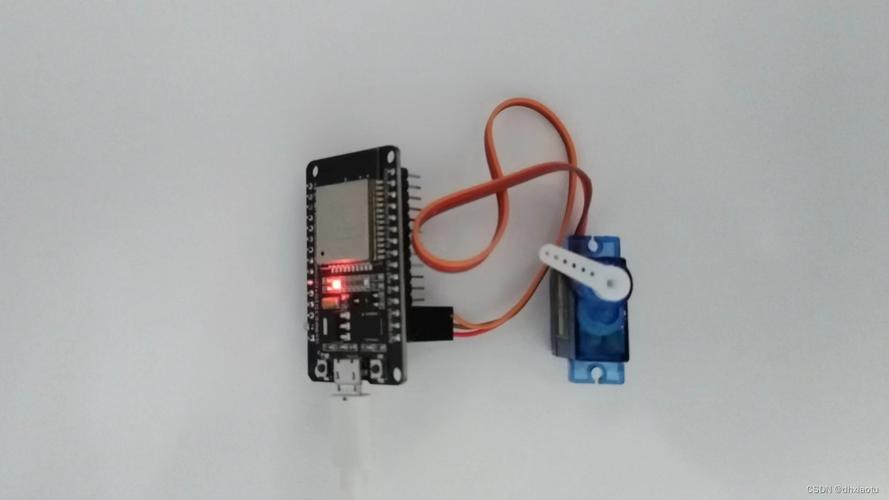
舵机的红线也就是电源正极,要去连接外部电源的正极,这个正极电压是5V或者6V,具体得依据舵机的规格来定;棕线或者黑线是电源负极,它要和ESP32的GND共同处于接地状态;橙线或者白线是信号线,需连接到ESP32的GPIO引脚处。
优选采用超过5V/2A的USB电源供电组,或者电池组,来分别给舵机另行给予供电。
对于ESP32而言,不是全部的GPIO引脚都对PWM输出予以支持,被用于连接Flash存储芯片的部分引脚,像GPIO 6 11,在默认状况下,是不可以当作普通PWM输出去使用的。
存在这样典型的现象,程序上传达成成功的状态,串口打印呈现正常的情形,然而舵机却全然没有转动表现。之后更换为其他的引脚以后,忽然就处于正常工作的状况了。
:
请选用以下所推荐的GPIO引脚,它们分别是,GPIO 2,GPIO 4,GPIO 5,GPIO 12,GPIO 13,GPIO 14,GPIO 15,GPIO 16,GPIO 17,GPIO 18,GPIO 19,GPIO 21,GPIO 22,GPIO 23,GPIO 25,GPIO 26,GPIO 27,GPIO 32,GPIO 33。
不要去使用,GPIO 0,以及 GPIO 1,还有 GPIO 3,另外还有 GPIO 6,再加上 GPIO 7,以及 GPIO 8,还有 GPIO 9,再有 GPIO 10,是 GPIO 11,因为这些引脚存在特殊功能或者启动的限制。
接线时确认信号线连接的是上述可用引脚。
ESP32的PWM控制器,和的Servo.h库并非全兼容,当运用的Servo库之际,默认的PWM频率为50Hz,然而ESP32的LEDC即LED PWM控制器,需手动去配置频率以及分辨率。
存在这样一种典型现象,其表现为,舵机仅仅能转到0度或者180度,却没办法在中间角度实现停止,又或者舵机持续不断地抖动,并且发出滋滋的声音。
:
推荐采纳库,它是针对ESP32而进行适配的。于库管理器里搜索并且安装“”,其作者为Kevin 。
示例代码关键部分:
#
Servo ;
void setup() {
.(13); // 使用GPIO 13
}
void loop() {
.write(90); // 转到90度
delay(1000);
}
倘若依旧需要依靠手动去进行配置LEDC,那就一定要保证PWM频率处在50Hz这样的数值(此频率所对应的周期是20ms),占空比的映射范围是,0度的时候对应着大约1ms(其占空比处于500 600这个区间),90度的时候对应1.5ms(占空比为1500),180度的时候对应2ms(占空比是2)。不同的舵机情况有可能存在略微的偏差,故而能够进行微调。
1. 接线:

舵机红线 → 5V外部电源正极
舵机棕线 → 外部电源负极 & ESP32 GND
舵机橙线 → ESP32 GPIO 13
2. 编程(使用库):
#
Servo ;
void setup() {
.(13); // GPIO 13
.write(0); // 初始位置0度
delay(1000);
}
void loop() {
.write(0);
delay(1000);
.write(90);
delay(1000);
.write(180);
delay(1000);
}
3. 查验:将程序上传之后,舵机理应逐个转向零点、九十度、一百八十度。要是依旧无法运作,那就请查看供电状况还有引脚情况。
先进行电源的优先检查,运用万用表去实际测量舵机所获得的供电电压,要保证其处于标称范围之内,也就是通常情况下的4.8V至6V之间。一旦电压呈现偏于低的状况时,舵机将会面临着要么力气不足伟创动力,要么出现抖动的情况。
将信号线进行换用,换用到可用的引脚,也就是说要换成GPIO 13、14、15等被推荐的引脚来开展测试。
先卸载掉旧的Servo库,然后着手安装库,之后再进行重新编译上传,以此来完成更换库并测试的操作。
纯粹单独去测试舵机,采用5V电源直接给舵机供应电力,朝着信号线输入一个频率为50Hz频率、20ms周期、占空比为1.5ms的方波信号,以此查看舵机是不是转向90度角度。要是舵机自身是完好无损的,那么问题必然是出在ESP32这一侧的配置方面上。
重新强调核心要点,ESP32对舵机进行控制,其能够正常工作存在前提条件,那就是要独立进行外部供电, 使用确切正确的GPIO引脚,还有匹配相应的PWM参数。只要这三项全部都确属正确无误,那么ESP32驱动舵机便会是稳定且可靠的。给出建议,应是在完成基础调试之后,逐步去增加多舵机控制,角度反馈,闭环控制等进阶功能伟创动力舵机,然而前提始终永远都是首要得先保障基础供电以及接线绝对无误。























