



























TECHNICAL SUPPORT

发布时间: 2026-05-29
当进行机器人、无人机或者自动化设备搭建之际, 不少人发觉舵机选型以及控制方案设定并非轻松之事。依据实际项目经验来讲, 一个完备的舵机控制方案得要符合三个关键要求, 分别是: 执行精准无误, 通信稳定可靠, 系统匹配得当。接下来围绕这些要点展开阐述伟创动力舵机伟创动力,助力你迅速梳理方案设计的要点处。
舵机控制方案的核心内容
一个标准舵机控制方案包括以下五个模块:
1. 对于舵机本体的选择, 要先依据负载需求明确扭矩, 再有角度范围, 接着是转速, 才是尺寸。常见的扭矩分档有, 从0到2kg一档, 2到5kg一档, 5到15kg一档, 15到40kg一档, 以及大于40kg一档;角度范围存在多种类型, 有从0到120°的, 0到180°的, 0到270°的, 0到360°的, 直流360°的, 可控多圈360°的, 可控速连续360°的等等。
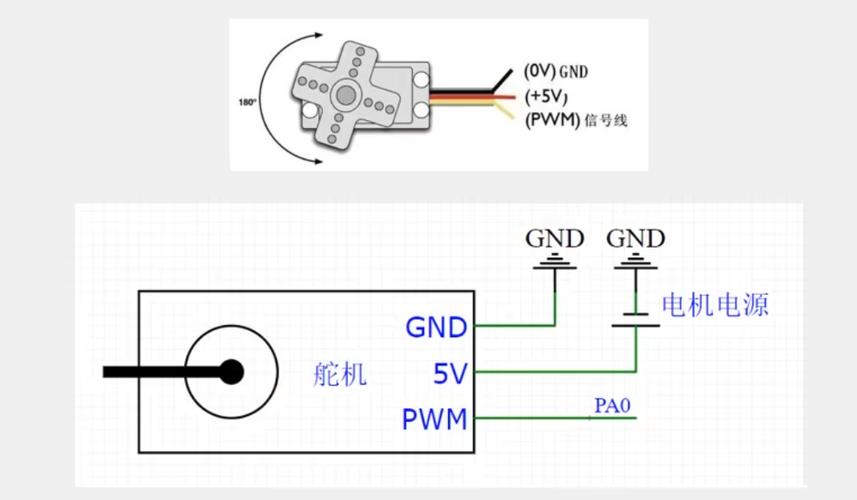
2. 通信以及接口协议, 其决定了控制的精确度, 还有系统具备的复杂度。较为主流的那一类协议涵盖了PWM, 此为模拟信号, 虽简单然而精度比较低, 另外还有RS485串口, 它抗干扰的能力很强并且支持多机的级联, 再者就是TTL串口, 以及CAN总线, 其具备高速实时性且适合多轴协调。
3. 供电以及电源管理方面, 舵机对于电压的稳定性有着较高要求, 常见的电压等级存在4.8至7.4V、8.4至12V、12至24V、24V以上这些情况, 一定要依据舵机参数去匹配稳压或者是降压模块, 以此来防止因电压波动而致使抖动或者失控。
4. 控制运用到的以及反馈, 其中涵盖了PID闭环控制, 还有位置反馈, 这位置反馈是通过电位计或者磁编码器来达成, 再者是电流检测等。而高性能的方案呢, 需要实时去反馈舵机角度以及扭矩, 依靠这样来达成精确位置控制以及过载保护。
5. 系统集成以及测试, 涵盖安装方式, 还有舵盘适配, 以及多机协调逻辑, 另外包括故障诊断接口等。在实际项目当中, 诸多问题产生于机械接口并非匹配或者通信存在冲突这点上。
舵机控制方案的设计要求
下面是历经诸多项目检验证实的六项基本要求, 直接对方案的成败起到决定性作用:
舵机额定扭矩跟负载需匹配, 其额定扭矩应比实际负载的数值大出1.5倍, 举例来说, 一个有着5kg·cm扭矩的舵机, 不要应用于长期负载超过3kg·cm的情景之中, 不然的话会加快磨损或者引发过热。
舵机设计角度所对应的范围跟机械限位是一样的情况, 要是舵机设计角度处在0到180°这个区间, 然而机械结构限制的角度范围是0到120° , 那么就一定要在控制代码里去设置软件限位, 以此来避免出现堵转损坏的状况。
针对通信协议的选择以及系统兼容性方面, 在多机协同的场景当中, 优先选用的是RS485或者CAN总线, 而PWM方案在多轴控制的情况下, 容易出现产生抖动以及线缆繁琐这样的问题。总线方案具备支持地址分配的特性, 这对于接线以及扩展从而说较为便利。
电源具备充足能力, 当多个舵机一同动作时, 瞬时电流有可能达到单个舵机的三至四倍。需要对总峰值电流进行计算, 并且要选用足额稳压电源, 与此同时, 每个舵机都配置一百至四百七十微法的电解电容来承担本地滤波。
调节频次以及回应速率, PWM信号通常建议处于50至330Hz范围, 总线方式要求主要控制MCU能够及时去处理反馈回来的数据, 防止通信出现丢帧情况。
防护等级方面, 针对户外的环境的情况, 以及粉尘环境的状况, 还有潮湿环境的情形, 要选用IP67防水等级的舵机, 并且, 要做好接线密封处理的工作。
常见问题与
很多人刚开始设计时容易忽略以下三点,导致项目返工:
问题1: 舵机出现抖动情况, 或者无法归位。多数情况下的原因在于, 电源的功率处于不足状态, 又或者是PWM信号线过长(超过50cm却没有添加屏蔽)。建议将供电线径加粗, 并在就近位置添加电容。
问题2: 在多舵机进行动作期间, 存在个别舵机出现掉线的情况。一般而言, 这是由于通信冲突, 或者是主控中断处理没有及时进行导致的。建议采用总线拓扑结构, 并且要确保主控具备足够的中断优先级来处理舵机通信。
问题3: 舵机实际呈现的角度跟指令不相符合, 这有可能是因为负载过大以至于造成位置反馈出现偏差的缘故, 又或者是舵机内部的电位器精度不够充足, 建议选用带有磁编码器反馈功能的智能舵机, 并且开启扭矩上限保护功能。
如何评估一个舵机控制方案
可以从以下三个维度快速判断方案是否合格:

执行的精度方面, 角度的误差, 是不是控制在了正负1°的范围之内, 重复定位的误差, 是不是小于0.5°。
通信稳定性方面, 于满负载状况下, 多轴运行持续2小时以上时, 是否会出现丢帧这种情况, 或者是否会出现卡顿现象, 又或者是否会有舵机掉线的状况呢。
系统鲁棒性表现为, 当供电电压出现上下波动幅度为正负百分之十的情况时, 舵机能不能维持稳定控制, 并且是否拥有过流以及过温自动保护功能。
行动建议
甭管你搞的是机器人关节设计, 还是云台控制设计, 亦或是自动化产线设计, 都得依照以下顺序去展开舵机控制方案设计。
1. 首个步骤: 清晰确定负载扭矩以及角度范畴, 据此计算得出所需舵机的的扭矩裕量, 还有那角度具体类型。
2. 第二步: 寻找适配的通信协议。针对少于4个舵机的简易系统, PWM并无妨碍;要是涉及多轴协调, 直接挑RS485或者CAN总线就行。
3. 第三步是进行这样子一个有特定操作要求的, 也就是称作设计电源系统的事项。针对此电源系统, 要达成的是确保总功率能够切实地满足峰值负载。同时, 还需要在每一个舵机端这个地方都加上滤波电容。
4. 第四步, 在编写控制代码之际, 要把软件限位、故障检测以及自动重连逻辑添加进去。
5. 第五步: 开展连续运行测试, 时长至少为24小时, 同时监控温度, 以及角度偏差, 还有通信丢包率。
归纳一下: 存在一个值得信赖的舵机控制方案, 其关键要点主要是扭矩匹配, 通信协议要选得恰当, 电源需保证充足, 反馈闭环这四方面事情。只要将这四点切实做好做到位, 那么你的项目便不会出现较大问题。当下就能够拿出你的那负载参数, 参照上面所提及步骤着手开展设计工作了。























