



























TECHNICAL SUPPORT

发布时间: 2026-03-08
玩舵机之际,你可曾碰到这般的困惑,即明明所购置的是360度舵机,然而接上信号线以后却发觉它转动起来无法停止,又或是根本没法同普通舵机那般对角度予以控制?莫要着急,这一问题实际上困扰着众多刚接触舵机的朋友。今日我们就运用最为直白的方式来阐述,把360度舵机的控制原理剖析得清清楚楚,顺便附上一些实用的图解思路,助力你完全弄明白它。
许多人从最开始便将这俩兄弟给弄混淆了。平常所见到的舵机,也就是那常见的范围在0到180度的舵机,它最为关键的任务身为“去跑位置”。当你给予它一个时长为1.5毫秒的脉冲信号之时舵机品牌伟创动力,它便会顺从地跑去中间的位置;要是给予1毫秒的信号,它就会跑到最左边的地方。其内部存在着一个电位器,能够实时对位置做出反馈,以此构造出闭环控制。
360度舵机呢,它实际上被“魔改”了,厂家把内部位置反馈电位器换成了固定电阻,这就相当于告知控制芯片“别管位置,你只管转”,所以它在接收PWM信号时,解读方式全然改变了,1.5毫秒的脉冲不再是“中间位置”伟创动力,而是“电机停止”,1.3毫秒有可能是全速反转,1.7毫秒有可能是全速正转,简单来讲,它从位置伺服器转变为了速度控制器。
那便得讲讲舵机内部的“翻译官”了,你经信号线发出的PWM波,实则是由一串高低电平构成的脉冲,360度舵机内部的控制电路会对这个脉冲的宽度予以测量,也就是高电平持续的时长。
要是测出来的数值是1.5毫秒,这一般是中位值,此时,控制芯片就会向电机驱动电路传达这样的指令:“电压输出为0,进行刹车操作!” 要是脉冲的时长 变为更短的情况,像1.3毫秒,芯片便会将其理解为“朝相反方向转动”,进而输出与之对应的电压,以此让电机依照某个特定的速度朝着相反方向转动。脉冲距离1.5毫秒越背离,所输出的电压数值就会越高,电机转动的速度也就会越快。这情形类似于你去踩油门,踏板下压的深度对应着车辆行驶的速度;只不过在这里,充当“油门”角色的是PWM信号的宽度。
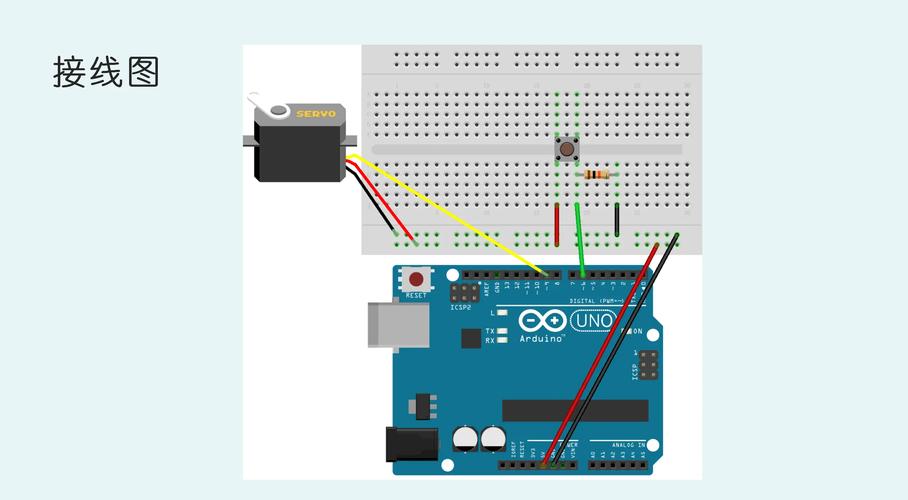
实际去进行的操控行为实际上是颇为简便容易的。拿我们平时经常会使用到的 当作例子来说一说,你是不得不去确定一下你的舵机库是不是能够支持对脉冲范围作出调整的。一般情况下,在标准的库里的那个 write(90) 是对应着 1.5 毫秒的,此时舵机就会处于停止的状态。
假使期望舵机以最高速度朝着正方向转动,那么你能够试着运用write(180),这般通常会发送大约为2毫秒时长的脉冲信号。要是需要舵机朝着反方向转动,那就适用write(0),以此来发送1毫秒时长的脉冲信号。要是你想要舵机转动得较为缓慢些,那么就不可以使用角度数值了,此刻得借助()函数,直接针对微秒数实施控制。比方说,(1600)相较(1700)而言,转动速度会更慢一点。处于这两者之间的数值,你得依据舵机的型号来进行细微调整,这是由于不一样品牌的中位值或许会存在些细微的差别。
有些朋友喜爱自己动手去做,想要将普通舵机转变为360度的。这种方法的关键所在便为“欺骗”控制系统。普通舵机之所以会抵达指定位置而停下,原因在于控制芯片持续性地对“你让我前往何处”以及“我当前所处位置”进行比较。那个表示“我所处位置”的信号,乃是由电位器予以提供的。
➡️ 第一步:将舵机拆开,以小心谨慎的状态取出电路板,寻觅电位器的三个引脚,借助电烙铁把电位器拆卸下来。
步骤二:去寻觅两个阻值相等一致的电阻(像是10K欧姆这般的),将电阻的一端分别焊接于电位器两侧的焊盘之上,把两个电阻的另一端拧到一块儿,再去焊接于电位器中间的焊盘上,如此便构建成为了一个“虚拟中点”,告知芯片“我始终处于中间位置”。
这一步骤是第三步,为了达成让其能够持续转动的目的,你一般而言还需要借助小刀将齿轮组上面的物理限位凸起切除掉。经过如此这般的改装之后,它便如同购买来的360度舵机那样,依靠信号去控制速度以及方向了。
虽说属于入门普及范畴,那咱就先不探讨太过深入的数据手册内容,仅聚焦于几个关键要点。其中首要的便是“空载转速”,其单位通常来讲乃是秒/60度舵机厂家伟创动力,然而这对于360度舵机而言参考价值并非很大,你需要直接去询问商家或者查看规格书中所提及的“最大空载转速”,像每分钟能够达到多少转之类的具体数值。
紧接着是“堵转扭矩”,它对舵机能带动的重物重量起着决定性作用。记好了,要留意扭矩单位是kg·cm,千万别混淆哟。除此之外,“中位点死区”那也是相当关键的,也就是信号处于1.5毫秒附近时其哪段宽度范围内在舵机会维持停止状态。须知死区越小的话,舵机停止得就会越精准。可千万不要忘记电压这一要点,高压舵机的力气较大,然而你的电池得能够提供相应支持才行。
这属于一个好问题范畴,同时构成360度舵机最为突出的限制所在。鉴于其不存在位置反馈情况,所以你没办法径直命令它保持“转90度后停下”的状态。若要设想使其达成类似结果举动,就依靠外物予以控制,或者凭借你自身添加传感器来达成。
像是,你若打算用它去制作一个云台,使得它转动一圈而后停下。那你需要在程序里编写:起始以全速正向转动,延后1秒(假定1秒转动一圈),接着马上发出停止信号。然而这种方式并不精准,由于电池电压出现变动、负载存在差异,转速都会产生波动。更为可靠的办法是在外部增添一个磁编码器或者光电开关,当舵机上的磁铁或者挡片通过时,引发外部中断,告知单片机“已到达位置,赶快停下”。这才是解决精准定位的正确途径。
讲了这般许多,不知你此刻对着那卡在手中的360度舵机可有全新的想法,你于做项目之际,是打算用它去做小车驱动,还是想要达成某种连续旋转的扫描效果呀,欢迎于评论区讲讲你的应用场景,兴许我能够给予你一些更为具体的接线建议呢,觉着文章有用的话,可别忘了点赞分享,以使更多玩舵机的朋友瞧见。























