



























TECHNICAL SUPPORT

发布时间: 2026-03-13
不少才着手玩STM32的友人,一旦遇上需驱动舵机的状况,翻开数据手册瞅见一堆寄存器便头疼不已。尤其当你期望把项目做得更具规范性、更易进行移植,想要运用HAL库时,却发觉网上的教程杂乱无章,要不就是寄存器版本的,要不就是陈旧过时的标准库版本。你是否也曾碰到过这般情形:明明依照步骤连接好了线路,舵机却要么一动不动,要么抖动得好似抽风一般,排查许久都搞不清问题究竟出在何处?
别急,今天我们专门来谈一谈如何运用STM32的HAL库巧妙地完成舵机控制。我会引领你避开那些常见的陷阱,好使你不但能够让舵机运转起来,而且还能够理解其背后的原理,往后不管是进行机器人关节控制,还是从事舵机控制,均能够应对自如。
实际上,绝大多数新手所遭遇的首个难题,便是没弄明白舵机所需的是何种信号。舵机所需要的乃是一个周期为20毫秒(也就是50Hz)的脉冲信号,并且其角度是由该脉冲的高电平持续时间来决定的。举例来说,0.5ms高电平对应着0度,1.5ms对应90度,2.5ms对应180度。好多人直接运用HAL库的延时函数来翻转IO口,这种做法在裸机运行简单程序的时候还算可以,然而只要稍微增添点其他功能,定时就不准确了,舵机自然而然就抖得极为厉害。
采用HAL库的恰当方式,乃是借助其定时器PWM输出功能。定时器能够精准地生成周期为20ms的脉冲,并且全然由硬件操控,不占用CPU时间。你所要达成的,仅仅是于初始化之际配置好定时器的时钟源、分频系数以及自动重载值,接着在主循环当中调整比较寄存器的值,便能够实时变换舵机角度,既具备稳定性又拥有高效性。
既然我们已决定采用HAL库,那么这个图形化配置工具便是我们的得力助手,你无需逐行去敲定时器的初始化代码,只需于软件里点点鼠标即可。,你需依据你的舵机型号,挑选一个能够输出PWM的定时器通道,比如使用高级定时器TIM1或者通用定时器TIM2 、TIM3皆可。
你要在当中伟创动力,将定时器的时钟源设定成内部时钟,接着于参数设置那里,把通道模式设置成PWM 。最为关键的一步是对分频系数以及计数周期进行计算。为了使PWM频率恰好为50Hz,你得让定时器的溢出时间等同于20ms。比如说你的STM32主频是72MHz,你能够设置分频系数为71,如此定时器时钟就变为了1MHz,也就是每微秒计数一回。将计数周期设定为19999,从0开始计数直至19999,此过程恰好是20000微秒,而20000微秒也就是20ms。如此这般所生成的PWM频率便是50Hz,它能够完美地匹配舵机的要求。
频率算好了之后,接下来要处理的就是如何将角度映射成占空比了。这一步骤实际上只是一个简便的数学换算。方才我们把计数周期设置成了20000,此计数周期对应的是20ms,如此一来,高电平时间所对应的计数值就能够很轻易地计算出来。举例而言,1ms高电平所对应的计数值是1000。
但,需留意,不同品牌的舵机,其0度与180度所对应的脉宽,可能会稍有差异,不同型号的舵机亦是如此。一般而言,舵机的脉宽范围是0.5ms到2.5ms,此脉宽范围对应的计数值是500到2500,其中间值1500对应的角度是90度。然而,有些舵机的脉宽范围可能是0.6ms到2.4ms,这种情况就需要你去查看舵机的说明书了。于代码之中,能够去定义两个宏,像这样的情况为,# 500 以及 # 2500 ,接着进行编写一个函数,将你所期望要转动的角度,例如是从0至180 ,以线性方式映射到该区间之内,最终调用 E 函数来设定比较值即可。
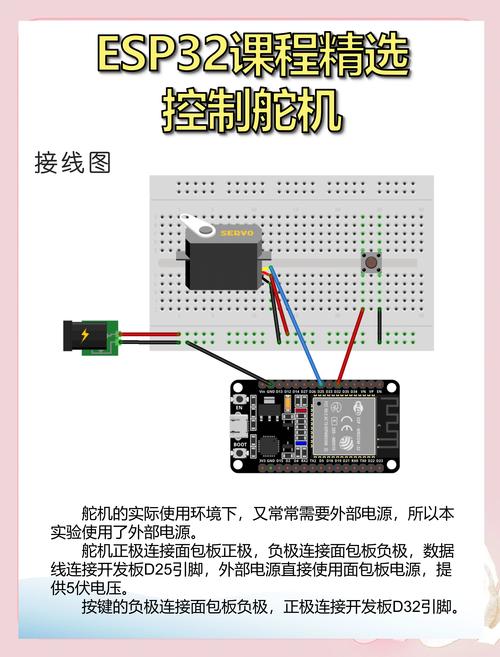
这个问题,几乎每个玩舵机的人都曾碰到,我亦是经历过之人。刚开始,为图省事,径直将舵机的电源线以及地线,插在了开发板的3.3V与GND之上,然而一上电,单片机即刻重启,或者舵机全然没有反应。这是由于舵机属于动力设备舵机厂家伟创动力,工作之际瞬间电流或许会达到几百毫安乃至更大,而STM32开发板上的稳压芯片输出的电流是有限量的,根本无法带动。
给舵机单独供电,这是正确的做法。一般情况下,微型舵机用5V供电便足够 ,你能够采用一个外部的稳压模块,要不然就直接连接航模电池。然而,关键的重要一点在于,电源的地线要和STM32开发板的地线共地 ,也就是将两个电源的负极连接在一起。唯有实施这样的操作,STM32发出的PWM信号才会有共同的参考点 ,舵机才能够正确地识别。
要是你打算去做一个六足机器人,或者是机械臂,那么就需要对多个舵机进行同时控制,利用HAL库来达成这点实际上极为便利,要是你的STM32型号所拥有的引脚数量足够多的话,你能够借助多个定时器当中不同的通道,每一个通道各自去控制一个舵机,然而如此一来会相对浪费定时器资源。
比较常用的办法是采用一款定时器的多个通道,像TIM2一般有4个通道,各个通道都能够独立输出PWM,你只要把它们的频率都设定为50Hz,接着分别设定每个通道的比较值,便能够独立操控4个舵机。要是你的舵机数量更多,还能够使用这类的舵机驱动板,借助I2C接口与STM32进行通信,一块板子就能够控制16路舵机舵机品牌伟创动力,HAL库的I2C驱动编写起来也是极为简便的。
倘若你好不容易促使舵机开始运转,然而却发觉它于目标位置周边反复地颤动,又或者发出“吱吱”的声响,此时先别匆忙去怀疑代码。这个问题一般存在两个缘由。其一为PWM脉冲欠缺稳定性,存在干扰。去核查一下你的舵机电源,看看是否供电不足,要么在电源两端并入一个大电容(像是470uF或者)来实施滤波,如此能够有效地改进抖动。
还有一个常见缘由是,更新占空比的频次过于快了。你无需在主循环里头,每一毫秒都去变动舵机的角度。通常来讲,20到50毫秒更新一回位置,就已然足够平滑了,并且还能给予舵机充足的响应时间。要是在进行位置闭环控制,那么就得查看PID参数是否调得太过了。先确定硬件供电不存在问题,然后再回过头来你的控制逻辑。
诸多交流之后,实际上你能够发觉,运用STM32的HAL库去操控舵机,关键要点在于妥善运用定时器的PWM功能,把供电问题处理妥当。在你亲自促使舵机依照您的指令精准转动之际,那种成就感是相当不错的。
并不清楚你计划借助舵机去实施一个怎样饶有趣味的项目,究竟是机械手掌,还是倒立摆?欢迎于评论区留下话语予以分享,我们一同展开经验的交流。要是觉得这篇文章对你存有帮助的话,可别忘了点赞并且分享给更多从事嵌入式的小伙伴!























