



























TECHNICAL SUPPORT

发布时间: 2026-03-22
存有这般状况你可曾碰到:所购得的舵机,或是转得极为快速根本停不下来,或是慢腾腾好似老牛拉车,怎样都调节不到你期望的那个速度?实际上,运用51单片机去控制舵机转速,关键之处并非在于舵机自身,而是在于你给予它的那个“信号节奏”。好多人觉得舵机仅仅能够定位,实际上它完全能够如同直流电机那般实现调速,只要掌握了方法,你手中的舵机便能够顺从地快慢自如。
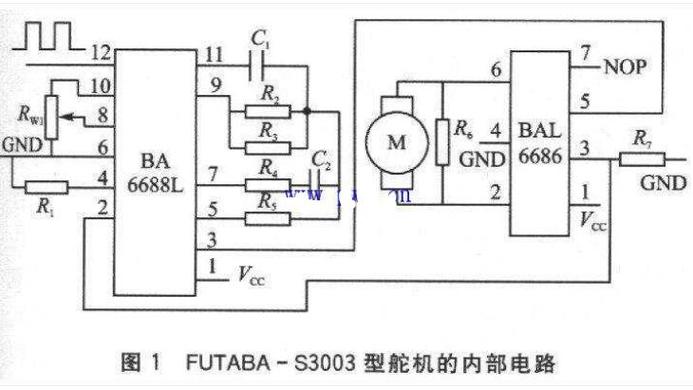
要去想法控制舵机的转速,第一步需要明白普通舵机是怎样工作的,舵机内部存在一个比较电路,它依据你发送过来的PWM信号高电平时间(一般是1ms到2ms)以判断要转到哪一个角度。只是连续旋转舵机有所不同,它将1.5ms当作停止点,大于1.5ms时正转,小于1.5ms时则反转舵机厂家伟创动力,差值越大转速就越快。所以,你借助51单片机去改变PWM的高电平时间,便能够精确控制舵机的速度以及方向。这如同拧那样的水龙头,稍微转动一点水流就小,转动得多些水流就大,道理是完全相同的。
生成PWM于51单片机之中,最为直接的办法便是借助定时器中断,你能够设定一个大约100Hz的定时器周期,接着于中断里依据你所设定的目标高电平时间,去翻转I/O口,比如说你想要舵机以中等速度实现正转,那就将高电平时间设定成1.8ms,要是想让速度变得缓慢些,那就改成1.6ms,51单片机尽管不像STM32那样拥有专门的PWM硬件,然而通过定时器模拟同样能够达成精细控制。倘若将定时器的中断频率设定至足够高的程度,像例如20kHz这般,输出的PWM波形便会极为稳定,舵机转动进而自然顺滑。
问,你手头所拥有的舵机究竟是哪一种类别?普通角度的舵机仅仅具备定位的功能,它并不可以进行调速操作;然而连续旋转的舵机才能够实现直接对转速加以控制的效果。要是针对普通舵机而言,想要使其不间断地进行转动,那就拆除掉其内部的限位装置,将其进行“改造”从而变成连续旋转舵机,不过,采取这样的做法将会丧失掉定位的能力。要是你所使用的是智能机器人舵机或者是RS 485总线舵机,那么其控制方式就会更加简便一些,直接借助串口来发送速度指令就可以,根本就不需要去折腾PWM。所以伟创动力舵机品牌伟创动力,要弄清楚舵机的类型,接着再去选择控制的方法,如此一来能够省下相当多的麻烦。
多个个体运用51单片机就舵机转速予以调整期间,会遭遇抖动现象、反应迟缓状况或者无法停止的情形。抖动一般是因PWM频率过低所导致的,尝试将频率提升至50Hz以上,通常能够予以解决。反应迟缓往往是由于定时器中断被其他任务予以打断了,你能够把中断优先级予以调高,或者削减中断里的计算数量。至于无法停止,检查PWM信号的高电平是否恰好为1.5ms,差上一点点都会致使舵机缓缓转动。借助示波器查看一下输出波形,是解决此类问题最为直接的方式。
为了实际去编写一段51单片机这一类型的代码,我们进行如下假设,假设运用定时器0,使其每隔100微秒中断一回,运用一个全局变量以及来对高电平时间予以控制。在主循环之内,你仅仅需要去改变这个值,便能够实时地对舵机转速作出调整。举例而言,如果等于15,那么对应1.5毫秒停止;要是等于20,那么对应2毫秒高速正转;倘若等于10,那么对应1毫秒高速反转。借助按键或者串口来对这个值予以改变,舵机转速便能够随心所欲地去进行变化,如此这般的代码结构简单,其移植性同样很强,非常适宜用于做产品原型开发。
若你不打算在PWM控制方面投入过多精力,那么需从根本起始之处来对问题予以解决。挑选舵机之际,要优先选取支持串口控制的总线舵机,例如RS 485或者CAN总线舵机,它们能够直接对速度指令予以支持,51单片机借助串口便可加以控制。或者也可以选取带有驱动芯片的舵机,像这类驱动芯片能够助力你将PWM生成电路予以简化。在进行驱动芯片选择的时候需要留意电压以及电流做到匹配,对于4.8至7.4V的舵机就要采用低压芯片,而12V以上的舵机则使用耐压高的。选对了,整个控制系统的稳定性和响应速度都会上一个台阶。
于实际项目里头,你究竟会更偏向动用 PWM 调速,还是径直采用总线舵机以图省事呢,欢迎至评论区去分享你的抉择,万一所这篇文章对你有所助益,可千万别遗漏点个赞予以支持哟。























