



























TECHNICAL SUPPORT

发布时间: 2026-03-24
把玩STM32进行开发,舵机控制差不多是难以避开的一个环节。好多刚刚入门的友人拿着开发板,连接上舵机却发觉它一点儿都不动,或者剧烈地抖动,心里必定不停地犯嘀咕:这个东西究竟该怎么样去控制?别着急,今天我们就来谈论一下运用STM32控制舵机的那些事情,从原理到实际操作,帮你梳理清楚思路。
舵机到底是个啥舵机厂家伟创动力,为啥要用单片机控制
舵机简而言之就是一个精确的“角度执行器”,你给予它一个指令,它便会将输出轴转动到指定的角度,而且能够自行稳住,咱们运用STM32,就是去充当那个发号施令的“大脑”,相比较于采用555定时器搭建电路,运用单片机进行控制更加灵活,不但能够控制角度,还能够控制速度以及启停,这对于制作机械臂、智能小车或者机器人关节而言,实在是太便利了。
舵机选型:扭矩和角度怎么选
舵机的有着许多繁复的参数,但是从入门的情境上来讲,最为关键的是扭矩以及角度范围。扭矩的常用单位是kg·cm,含义是在舵机臂距离为1厘米的地方,可以提起某个载荷。要是你仅仅需完成一个简易的小摆头,那么2至5kg这一区间的舵机就能够满足需求;要是着手制作机械臂,那么至少得选用重达15至40kg的类型,甚至可能需要更大扭矩的产品,角度范围这一因素也考虑周全,寻常舵机大都涵盖0至180°这一范围,要是制作能够进行360°连续旋转的轮子,那就挑选那种具备“可控速连续360°”功能的舵机,千万不要出现购买错误的情况。
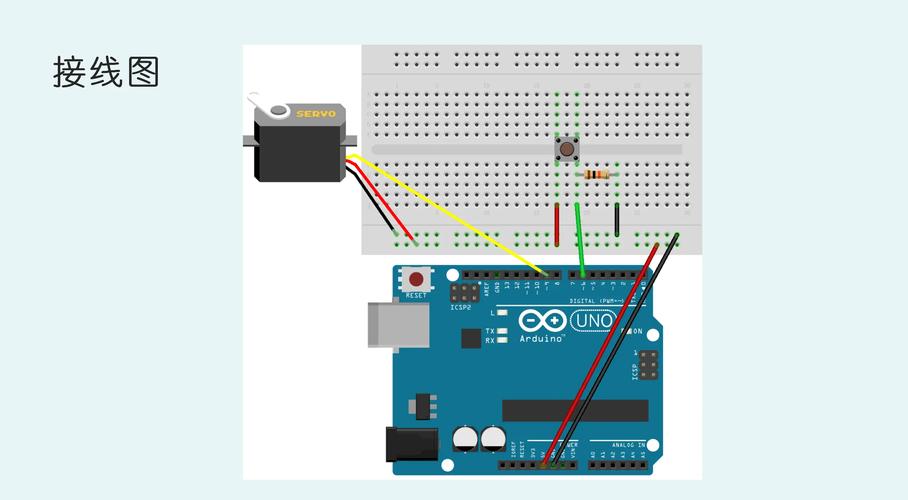
接线:千万别接反,否则冒烟没商量
身为新手,接线这件事可是极易踏入的陷阱所在。舵机呢,正常情况一般共有三根线,其一是棕色线抑或许是黑色线,此为地线,即GND,其二是红色线,它属于电源线,也就是VCC,其三是黄色线或者是橙色线,则是信号线,即PWM。对于STM32的IO口而言,其输出为3.3V,所以呢,信号线能够直接进行连接。然而,电源线可绝对不能直接从STM32的3.3V引脚去取得电力供应!道理在于,舵机进行启动那瞬间,电流是极大的,如此便会将芯片给烧坏掉。正确的做法是,采用外部5V供电,或者依据舵机电压要求供电舵机品牌伟创动力,像是4.8至7.4V,之后将STM32的GND与舵机电源的GND连接在一起,如此信号才能够正常进行传输。
程序逻辑:PWM到底是怎么控制角度的
依靠PWM(脉宽调制)来控制舵机,简单讲就是给予其一个具备特定宽度的脉冲。普通舵机的工作原理如下:在周期为20ms的脉冲当中,高电平持续0.5ms对应着0度,持续1.5ms对应到90度,持续2.5ms对应为180度。其间的对应关系呈现为线性。你无需去纠结底层定时器该如何配置,采用STM32的通用定时器,设定好PWM输出模式,接着径直改变比较寄存器的值,便能够驱使舵机实现平滑转动。
代码实操:从点动到连续运行
编写代码之际,提议率先将PWM输出调试妥当。举例而言采用定时器2的通道1输出PWM,把周期设定为20ms。接着定义一个函数伟创动力,输入角度范围是0到180,能够自动算出相对应的占空比。此处存在一个小窍门的做法为,运用while循环以及延时,使得舵机从当前所处角度缓缓转动至目标角度,在中间添加一个小延时,如此这般动作看上去会更加丝滑顺畅,不会骤然一下弹过去。要是想要舵机能够连续动作,即可定时去改变目标角度值,促使其来回摆动。
常见问题:抖动和没反应咋办
碰上问题别忙着慌张,舵机出现抖动现象,最为常见的缘由是电源供电不够充足,去换一个电流相对大些的电源尝试一下。要是完全没有出现反应,要确认是否共地了,也就是前面所讲的,控制板以及舵机的GND使用导线连接起来。另外存在一个隐蔽问题,要是你的舵机属于数字舵机,信号频率或许要求更高,普通模拟舵机只需50Hz(周期为20ms)便足够,数字舵机也许得在300Hz以上,这得查看舵机的具体说明书。
瞅见这,没准你已然觉察来了,借由STM32操控舵机,关键就在于三点,分别是:适配的舵机型号,恰当的供电以及共地,精准的PWM信号输出。要是你正着手研发一款崭新的产品,力图找寻到性能稳固、扭矩精确的舵机,不妨去探寻一番“高性能无刷舵机”亦或是“智能机器人舵机”,瞧瞧那些专业厂家的选型指南,说不定会给你带来全新的灵感。你手头最为想用舵机达成的功能是啥?在评论区讲讲你的设计思路吧!























