



























TECHNICAL SUPPORT

发布时间: 2026-04-17
在这儿要讲的是,利用PLC去进行控制舵机的那般最为简便的办法,仅仅只需要三个步骤,就能够达成角度精准控制。比如说,以平常会见到的小型自动化设备,像简易机械爪、自动门挡作为例子来讲哦,并不需要那种复杂的编程知识,只要依照步骤去操作,就能够成功啦。
PLC控制舵机的核心结论是,输出一个周期为20ms,脉宽在0.5ms至2.5ms之间的PWM信号,这是其本质所在。只要完成硬件接线,进行PWM输出配置,开展脉宽调试这三步,便能够让舵机转到随意定义的特定角度。
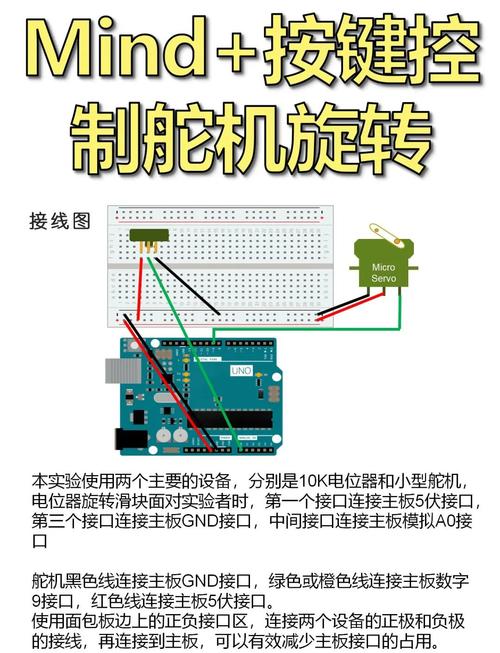
有着电源线(红色)、地线(棕色/黑色)、信号线(橙色/黄色)这三根线的舵机,PLC输出一般是NPN或者PNP晶体管型,仅需一根信号线就能进行控制。
操作步骤:
1. 供电连接方面,要把舵机红色线连接到+5V直流电源上,要是舵机是7.4V 的话,那就连接对应电压。需要注意的是,PLC的24V输出不可以直接给舵机供电,一定要使用独立稳压电源。
2. 共地连接,把舵机棕色线跟 PLC 的 COM 端以及电源负极端伟创动力舵机,将这三者连接在一起,这可是极易被忽略的一步,若不共地就会致使舵机出现乱转或者不转的情况。
3. 把橙色线与舵机相连,让其连接至PLC的高速脉冲输出点,像晶体管输出型的那个Q0.0。
常见案例:某小型分拣装置中,采用西门子S7200 SMART PLC的Q0.0点直接驱动舵机,共用5V电源负极后,舵机即能响应。
舵机所要求的控制信号,其周期为20ms,也就是频率为50Hz,其中高电平脉宽在0.5ms至2.5ms这个范围,此范围对应着0°至180°。
只需让PLC在对应输出点生成PWM即可。
以主流小型PLC为例,通用逻辑如下:
设置PWM周期:20000μs(20ms)
设置初始脉宽:1500μs(对应90°中间位置)
启动PWM输出
不同品牌PLC的指令名称不同,但参数一致:
编程实操(伪代码逻辑):
// 初始化:定义PWM周期20000μs,占空比7.5%(即1500μs)
(通道=Q0.0, 周期=20000, 初始脉宽=1500)
(通道=Q0.0)
// 改变角度:直接修改脉宽值
(脉宽=500) // 转到0°
延时1秒
(脉宽=2500) // 转到180°
注意:使用晶体管输出型PLC,继电器型无法输出高速PWM。
连接好线路,完成下载程序之后,那个舵机理应是会进行转动的。要是出现了抖动现象,又或者尚未达到预定位置,再不然就是根本不转动,那就按照顺序去展开排查:
常见问题及解决方法:
快速验证方式:运用PLC的线上监控功能,径直去修改脉宽寄存器的数值,比如从1000μs变动到2000μs,按照100μs的步长逐步递增,查看舵机是不是平滑转动。
重复强调核心观点:PLC控制舵机遵循的物理原则为,仅需三步,其一,把舵机、电源以及PLC三者共同接地并连接好信号线;其二,设定周期为20ms的PWM输出;其三,借助改变脉宽(500~2500μs)来控制角度。任何品牌的PLC均遵循此物理原理。
行动建议:
1. ,处于一块空旷所在的PLC之上,依照上述步骤开展单独试验,不要径直接入复杂的系统。
2. 预先准备好一个简易示波器,或者准备一个逻辑分析仪,去测量Q0.0所输出的脉宽究竟是不是准确的。
3. 要是舵机所承载负荷较重,那就把供电的电流提升,使其达到1A以上,并且添加1000μF的电解电容来实现稳压。
4. 记录下你所用舵机的实测最小和最大脉宽值,后续编程直接套用。
将这三个步骤予以执行,在二十分钟的范围之内,便能够促使PLC对舵机角度实施精准控制。要是碰到了特殊型号的串口舵机或者总线舵机,那就需要改用RS485或者CAN通信方式,本PWM方法不适用于此。























