



























TECHNICAL SUPPORT

发布时间: 2026-04-19
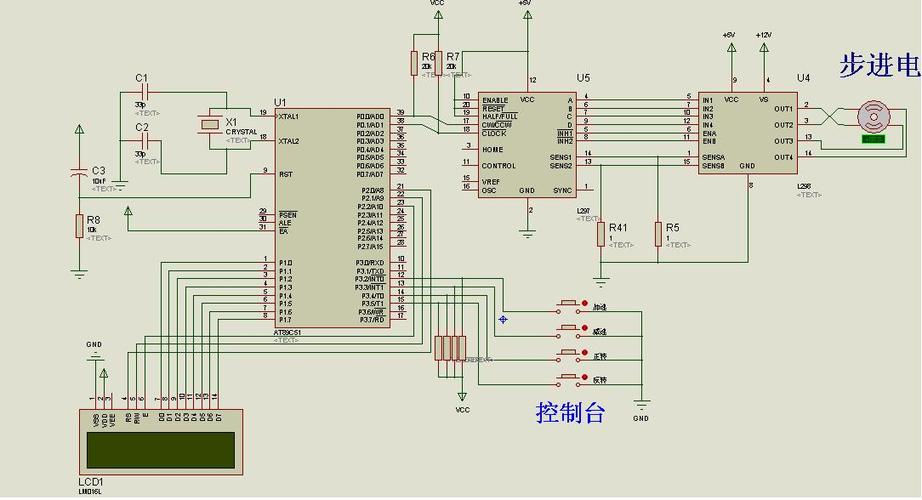
要是您正处于调试一个机器人关节的状况下,要是察觉到舵机并没有做出响应或者抖动得极为剧烈,那么最为直接的解决办法便是弄明白舵机控制器的原理图,并且一级一级地去测量关键节点的信号。舵机控制器原理图的关键部分是一个位置闭环控制系统,它会接收控制信号,一般来说这个控制信号是PWM,借助内部电路去比较目标位置还有实际位置,实际位置是由电位器反馈回来的,随后驱使电机正向转动或者反向转动,一直到位置达成一致。它是根据通用舵机控制器的标准进行设计的,能为您详尽剖析每一部分原理图的构成情况,还能清楚地解析其功能,并且能明确指出常见故障所对应的检查点。
一张符合标准的舵机控制器原理图,涵盖着下列五个具备不同作用的功能模块,这些功能模块共同组建起闭环控制回路,是这样的,没错吧!
要害掌握:舵机从本质方面来讲是那种“角度伺服系统”。在控制器原理图里边,最为关键的闭环逻辑是这样的:目标角度也就是PWM脉宽,它去到比较器那里,与反馈电压形成差值进行比较,然后电机驱动根据这个比较结果来确定转动方向,转而电位器会依据电机转动情况产生反馈电压变化,当误差变成零时就截止运行。
典型电路结构:
将外部电源的正极接入之后,先是并联上一个大容量的电解电容,这个电解电容一般是处于100μF至470μF的范围,其作用是用来滤除掉低频纹波,接着再并联上一个陶瓷电容,该陶瓷电容的容量为0.1μF,它的作用是滤除掉高频噪声。
随后,借助三端稳压器(像78M05这类),输出稳定的5V电压,以此供应给控制芯片,以及电位器。
稳压器输入输出端均需对地接电容。
关键检查节点:
:测量是否与电池/电源电压一致。
:稳压器输出端应有稳定的5V±5%。
GND:所有模块的地线单点或星形连接,避免地环流干扰。
平常会碰到的故障实例:某个机器人的舵机,在电机开始启动之际,出现了“抽搐”状况或者处于失控状态,经过对原理图进行检查,发现电源的输入端缺少大电容,在电机启动的瞬间,致使电压被拉低伟创动力,从而使得控制芯片复位。解决办法:依据原理图补焊470μF的电容之后,恢复到正常状态。
典型电路结构:
向外的PWM信号线路,一般而言是白色或者黄色的那种,该线路串联一个阻值在100Ω至470Ω范围的限流电阻,以此来避免信号出现过冲的情况。
对地并联一个10kΩ下拉电阻,避免悬空时误触发。
在提升抗干扰能力这件事上,好多设计会接入施密特触发器,像这个型号,以此来对信号进行整形,或者会运用光耦,例如PC817,去实施电气隔离。
关键检查节点:
该节点为,测量它的仪器选择示波器,方法需清晰,幅值一般是3.3V或者5V,周期为20ms,脉宽从0.5ms至2.5ms。
信号需进行整形,还得进行隔离,之后才会输入到控制芯片引脚,其应有的波形须与输入的基本保持一样,不能出现畸变,是这样的情况。
常见故障的例子呈现为,舵机出现完全没有任何响应的状况,然而电源却是处于正常状态的。通过使用示波器去测量节点,发现不存在信号,进而进行检查,结果发现是串联电阻出现了虚焊的情况。之后重新进行焊接,于是恢复了正常。
这是舵机控制器的“大脑”,有两种常见实现方式:
方案A:基于专用舵机控制芯片(如TSSOP20封装芯片)
芯片内部集成PWM脉宽测量、比较器、死区控制等逻辑。
引脚具备这样一些功能,其一为PWM输入,其二是反馈电压输入并带有(ADC),其三是正反转控制输出且有两路,其四则是使能控制。
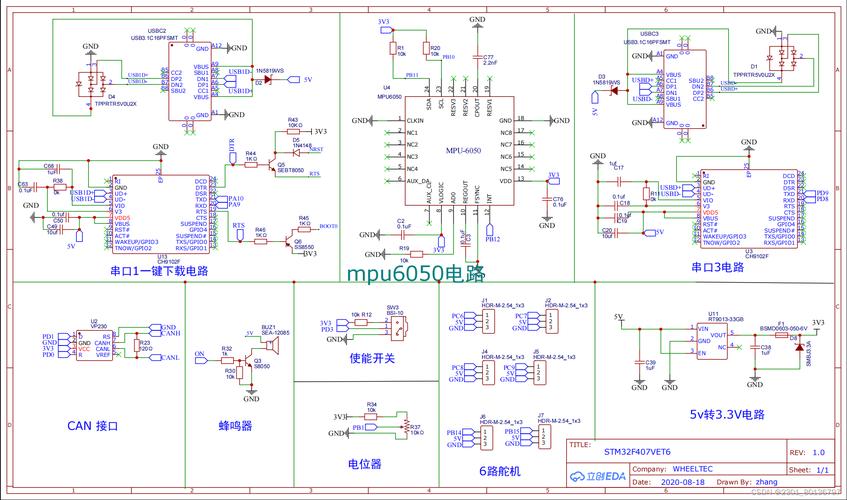
方案B:基于通用MCU(如或)
微控制器单元借助定时器抓捕脉冲宽度调制电势宽度,凭借模拟数字转换器读取电位器电压,随后经由比例积分微分输出两路脉冲宽度调制信号操控H桥。
原理图上会标注晶振(如8MHz)、复位电路、编程接口。
关键检查节点:
,它是用于控制芯片的反馈电压输入引脚,此引脚的电压范围处于0V至VCC之间,并且该电压是随着舵机转动而呈现线性变化的。
,是控制芯片输出的,用于电机控制的一路信号;,亦是控制芯片输出的,但通常为相反极性的另一路电机控制信号。
核心逻辑验证:在PWM脉宽处于1.5ms也就是在所说的中位情况下,电机驱动输出规定是0 ;当脉宽比1.5ms要大的时候,呈现为高电平,呈现为低电平,这就是正转的情况 ;要是小于1.5ms的话,情况就反过来。
典型电路结构:
利用H桥驱动芯片(像是、这类),或者借助4个NPN加PNP三极管(例如/)来进行搭建。
两路逻辑信号,分别是IA与IB,其输出与不经过任何中途情况而直接相连处于其间的直流电机两个终端部位交接。
常规情况下,原理图里一般含有续流二极管 ,此续流二极管有的直接内置在芯片之中 ,其主要起到避免电机反电动势对电路造成损坏的作用。
关键检查节点:
IA / IB:来自控制芯片的信号,高电平有效。
电机两端电压相关,MOTOR+与MOTOR,当IA=高且IB=低时,MOTOR+呈现为VCC,MOTOR呈现为GND,反之则电压呈现反向。
常见故障实例呈现这样一类情形,舵机要运转动弹却转不起来,不过能听到电机发出的声响,对电机两端电压给予测量,其数值很低,就像仅有0.5V ,再有就是出现H桥芯片发热的状况,经过查验原理图得以发觉,H桥芯片其输出引脚位置出现虚焊现象,从而致使电流通路电阻变得过大,实施补焊操作之后就恢复为正常状态。
典型电路结构:
具有一定阻值范围(通常为5kΩ至10kΩ)的线性电位器,其固定端这一部分需要分别连接到VCC以及GND,而滑动端则要连接至控制芯片的ADC输入引脚。
电位器这儿,其转轴同舵机输出齿轮系相耦合,当输出轴转动起来的时候,滑动端电压呈线性变化,范围是从0到VCC。
关键检查节点:
:滑动着的端电压,用人为手动方式缓慢地去转动舵机输出轴,此电压应该呈现出平滑地步态变化,不存在跳变或者断点情况。
闭环验证的方法是,给予舵机一个固定的PWM信号,比如说这个信号对应着90°,之后借助外力尝试去转动输出轴,此时你会感觉到电机主动进行抵抗,并且试图返回至设定的位置。要是不存在这种抵抗的情况,那就表明反馈模块或者控制核心出现了异常。
按照原理图连线顺序,信号完整路径如下:
1. 控制信号进入,先是外部的PWM信号,随后经过限流电阻,接着通过施密特触发器进行整形,到达控制芯片的捕获引脚。
2. 针对于目标方位角度依照特定方式进行剖析解读:对控制芯片展开操作从而测量PWM脉宽,此脉宽存在如此这般对应关系,像是1.5ms所对应的乃是中位,之后再去计算,求得与目标角度相应的电压数值。
3. 依照实际角度予以获取,电位器滑动端所有的电压,传导至控制芯片的ADC引脚,进而被转换成为当下的角度。
4. 先对芯片内部的目标电压以及反馈电压进行比较,以此来进行误差的计算,然后开展驱动工作,若误差大于死区,那么就会将转向信号输出到H桥。
5. 电机进行转动,通过H桥来驱动电机实现正转,或者使电机发生反转,接着减速齿轮组带动输出轴进行转动,并且在带动输出轴转动的同时带动电位器进行旋转。
6. 电压反馈形成闭环,电位器的电压朝着目标电压逐渐渐近,致使误差变为零,芯片随之停止驱动,电机进而停止转动。
实际上,舵机控制器原理图并非一张繁杂的连线图,而是“位置闭环伺服系统”的一种物理呈现。不管您瞧的是哪种舵机的原理图,都能够依照“电源→信号输入→控制核心→电机驱动→ 位置反馈”这样的五步定位法来予以剖析。请记好:PWM脉宽确定目标角度,电位器电压反馈实际角度,两者对比之后所产生的误差驱使H桥转动电机,直至误差变为零。倘若在这一闭环链路里,存在有任何一点发生断路的情况,或者出现信号异常的状况,那般舵机便不能够正常地开展工作。
1. 绘制一张符合规格的原理图,方式为打印或者手绘,使用彩笔去标记出五个模块各自的边界,还要进行三个核心测试点的标注,这三个核心测试点分别是:、波形、电位器滑动端电压。
2. 要准备好基本工具,即是那种数字万用表,其作用是测量电压还有通断状况,还要准备示波器伟创动力舵机,它的用途是观察PWM波形,此时可用20元的逻辑分析仪来替代,也得准备电烙铁。
3. 实施“信号注入法”来排除故障,先断开外部控制信号,接着用手转动舵机的输出轴,随后测量电位器的电压是否呈线性变化,之后给予一个已知正确的PWM信号(比如说借助生成脉宽为1.5ms的信号),再逐级测量、/B以及电机两端的电压,如此便能迅速找准开路或短路的位置。
按照上述原理图剖析方式以及排查流程,您能够于15分钟之内处理90%以上的舵机控制器故障,并不需要借助任何品牌专门的维修指南。























