



























TECHNICAL SUPPORT

发布时间: 2026-04-27
舵机,作为在机器人、航模、智能小车等项目里常见的执行元件,当你理解其内部工作流程时,便能够助力你迅速排查故障、控制代码。本文依据标准舵机(3线制:电源、地、信号)的通用工作原理,给出完整的工作流程图,并且以实际案例阐述每个环节。
舵机的实质是一个位置伺服系统,它的工作流程涵盖4个关键步骤,先是信号输入,接着是误差比较,然后是电机驱动,是位置反馈,以下是详细流程图:
[主控板/遥控器] 输出PWM信号
↓
┌───────────────────────────────────────┐
│ 1. 信号接收与解析 │
│ 检测PWM脉宽(通常0.5~2.5ms) │
│ 转换为目标角度值(0°~180°或0°~270°)│
└───────────────────────────────────────┘
↓
┌───────────────────────────────────────┐
│ 2. 比较器:计算偏差 │
│ 读取电位器当前电压(实际角度) │
│ 偏差 = 目标角度 实际角度 │
└───────────────────────────────────────┘
↓
偏差≠0 → 继续 偏差=0 → 停止
↓
┌───────────────────────────────────────┐
│ 3. 电机驱动控制 │
│ 偏差正/负决定电机正/反转 │
│ 偏差大小决定PWM占空比(转速) │
│ H桥电路驱动直流电机 │
└───────────────────────────────────────┘
↓
┌───────────────────────────────────────┐
│ 4. 机械传动与反馈 │
│ 电机转动 → 减速齿轮组 → 输出轴 │
│ 输出轴带动电位器滑动臂 │
│ 电位器输出电压实时反馈给比较器 │
└───────────────────────────────────────┘
↑ │
└────────────── 回路闭环 ────────────────┘
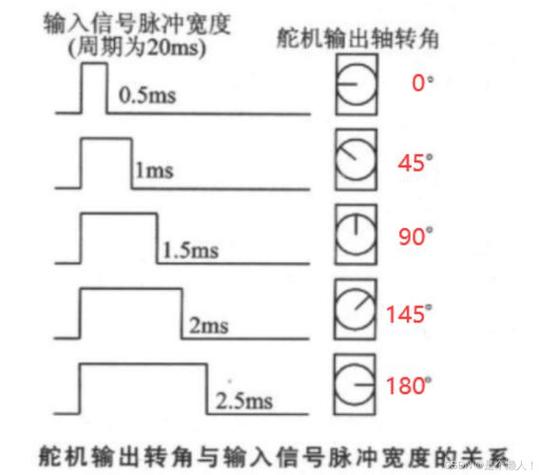
信号的标准是,其周期为20毫秒也就是50赫兹,同时,高电平脉宽为0.5毫秒的时候对应着0度,当高电平脉宽是1.5毫秒时对应90度,而高电平脉宽为2.5毫秒时对应180度。
内部进行处理时,舵机当中的控制芯片,会对上升沿予以捕获,同时也会捕获下降沿,之后计算脉宽,进而将其映射到角度值上。
常常出现的案例情况是,当运用去输出.write(90)的时候,实际上会产生具有1.5ms脉宽的PWM。要是舵机没有做出动作,那么就要先去检查用于连接的信号线是不是接触处于良好的状态(运用示波器去测试引脚的波形特点)。
电位器进行反馈时,输出轴只要转动了一定的角度,电位器的电阻值会呈现线性变化,并且输出电压等于实际角度所对应的数值。
用于比较的逻辑是这样子的:目标角度所对应的电压,跟反馈回来的电压,在内部的比较器里进行做减法的操作。当这个减法得出的差值等于零的时候,电机会停止转动,并且保持在当前的位置。
时常出现的案例情况是,要是舵机于目标位置的周边区域持续地发生抖动现象,那么这表明电位器存在着磨损状况,或者反馈信号的噪声比较大,这种情形下可以试着去添加滤波电容。
驱动方式是,偏差信号经过PID(比例 积分 微分)进行处理,之后生成电机正反转的指令,同时还生成电机转速指令。
针对电机类型而言,普通舵机所采用的是直流有刷电机,高端舵机所采用的是无刷或者空心杯电机,不过流程图的结构是相同的。
常见的案例是,手动去拨动舵机的输出轴时,能感觉到明显的卡顿情况,或者是感觉无力,这种状况下,有可能是齿轮出现了损坏 ,其中塑胶齿比较容易出现扫齿的现象,又或者可能是电机的碳刷已经耗尽了。
起到减速作用的机构,能够达成降低转速的效果,同时还能增大扭矩。其中,以金属制成的齿相较于用塑胶制成的齿,具备更为耐用的特性,然而,这种金属齿会在一定程度上略微增加回差。
每20毫秒(也就是一个PWM周期的时长),进行一次重新比较行为,此之谓闭环更新,当外力对输出轴予以推动时能够保证舵机自行将角度校正回归至目标角度。
一般常见的情况事例是,当机器人处于行走状态的时候,舵机出现迟缓的状况,这有可能是因为更新频率不够充足,(这种情况下需要把控制信号发送的频率提升到50Hz至333Hz,具体要依据舵机所支持的情况来看)。
舵机工作的本质是一个“目标反馈修正”的闭环控制过程:
输入PWM脉冲 → 确定目标角度。
电位器实时报告实际角度。
控制芯片计算偏差,驱动电机向减小偏差的方向转动。
偏差归零时停止,并持续对抗外部负载扰动。
不管舵机是塑料齿的情况,还是金属齿的情况,不管是模拟的状况,还是数字的状况,也不管是高压的情形,还是低压的情形,其底层工作的流程图都是完全一样的。唯一存在的区别在于,数字舵机的内部增添了MCU,能够去执行更高频率的PID计算,并且有着更精细的响应曲线。
根据上述流程图,当你的舵机出现异常时,按以下顺序排查:
异常现象 按流程图定位环节 推荐检查动作 |
这似乎并不是一个完整的句子呀,请你提供具体的内容以便准确改写。
呈现出完全不开展转动这种状态,针对于步骤1(信号)或者步骤3(驱动),要进行这样的操作,即测试其PWM信号有没有输出,该项测试需要借助示波器或者逻辑分析仪来完成。
2. 换一个正常舵机验证电源和信号源 |
一种情况是抖动,或者出现嗡嗡响伟创动力,处于步骤2也就是反馈阶段,其中的1要求去检查电位器焊点是不是虚焊。
2. 给信号线并联100nF电容去噪 |
角度出现的偏差幅度很大,进入步骤2也就是比较器校准环节,进而要重新去校准舵机的中点,具体做法是发送1.5ms脉宽,而且要手动去调整电位器的固定螺丝。
呈现出带负载之后呈现出无力的状况,处于步骤4(机械方面),将其拆开进而检查齿轮是否存在磨损情况,对于金属齿而言能够添加润滑脂,而塑胶齿则是直接进行更换。
提议你留存本文当中的流程图,将其当作现场调试快速查阅手册。于编写控制程序之前,先要对照流程图去确认信号时序以及反馈逻辑,这样能够避免超过90%的低级接线以及时序错误。
注意,这篇文章所进行的描述依存于工业标准舵机公开的原理,并不牵涉任何特定的品牌或者型号。在实际的应用当中伟创动力舵机,特殊定制的舵机其角度范围、PMS脉宽边界或许存在差异,请以产品手册作为依据。























