



























TECHNICAL SUPPORT

发布时间: 2026-02-16
搞懂舵机参数,别让机器人项目卡在第一步
刚接触机器人制作的许多朋友,刚接触制作的不少朋友,最头疼的问题皆是怎么去选舵机。望着一堆参数,有扭矩参数,有电压参数,有角度参数,有尺寸参数,人都烦了。实际上,选错舵机是项目失败极为常见的缘由,要么是力气太小带不动相应部件,要么是尺寸太大装不进指定位置。今日咱们就把这选舵机的事儿梳理明白,让你往后选舵机时心里有底,不再迷茫无措。
力气大小即简单而言的扭矩,它可是舵机最为关键重要的参数,其单位一般常常是kg·cm。像3kg·cm所表达传达的意思是,在距离舵机轴心为1厘米之处地方区域,可能够带动3公斤的物体。
如何去判定你的项目所需的扭矩大小呢,你能够对机械臂或者关节所要对抗的阻力作出估算,要是属于小型玩具或者舵机,0至5kg通常来讲便足够。若为机器人的腿部关节,其需要对整个机身予以支撑以及进行移动,建议去考量15kg以上的产品。
更具保障性的做法是,先计算出理论上的需求,之后再在此基础上向上留出百分之三十至百分之五十的余量。如此这般,舵机运行起来会相对较为从容,不太容易由于瞬间过载进而被烧毁,并且其使用寿命也会更为长久。
关乎转速以及扭矩输出的舵机电压,并非能够随意确定,市面上常见的舵机电压,存在着4.8至7.4V的低压版本,还有8.4V以上,甚至于12至24V的高压版本。
有这样一种情况,当电压有所提高时,舵机的转速便会变得更快,而且扭矩也能够更为充分地展现出来。举例来说,同样处于高压无刷舵机这个范畴,在7.4V以及11.1V这两种电压条件下,其表现或许会存在较大差异。然而需要留意的是,为你的舵机提供电力供应时,电压绝对不可以超出它所标明的最高准许数值,不然的话极容易致使内部电路被烧坏。

,选那舵机之前得先琢磨好你的电源供应方案,要是采用锂电池供电,那就得依据电池的充满电时的电压去适配舵机,选准了电压,方可使舵机展现出最出色的性能。
使舵机转动的角度范围,决定了其能够实现转弯幅度的大小,常见的角度数值存在120°这一情况、180°这一情况、270°这一情况以及360°这一情况。要是针对普通的车模转向状况或者简单的机械爪而言,120°这种角度或者180°这种角度基本上就能够满足需求了。
但要是你正在从事机器人头部、云台的工作 ,或者处于需要舵机进行多圈旋转的情景之中 ,像卷扬机这种场景就是如此舵机厂家伟创动力,那此时就得挑选360°或者可控多圈 360°的舵机才行。部分连续旋转的舵机还被区分成只能持续转动的以及可以控制速度的 ,这同样需要依据具体的需求来决定。
项目存在小窍门,要是你的项目对角度控制要求极为精确,像仿生机器人这种情况,那么大角度的舵机搭配高精度的控制协议,同小角度舵机借助齿轮放大的方式相比,会显得更为直接,也更为精准。
这一问题的关键所在,实际上是“我的产品究竟要于何种环境之中来使用”。要是你仅仅打造一个桌面级别的机械臂,又或者是普通的车模、航模,那么标准的数码舵机或者空心杯舵机在性价比方面是最为突出的,完全能够满足使用需求了。
但是,倘若你的项目是户外机器人种类,或者是勘探设备类型,又或者存在可能会接触到水这种情况,以及可能会接触到灰尘这种情形,那么就得考虑 IP67 防水舵机了。这种舵机具备密封性良好的特性,能够直接处于泡在水里的状态进行工作。另外,高性能无刷舵机相较于传统的有刷舵机而言,拥有寿命长的特点,具备效率高的优势,产生的噪音也比较小,尽管价格会贵上一些,然而对于对性能要求高的项目来讲是很值得投入的。
就一般情况而言,平常的环境之下使用普通的舵机,要是处于严苛的环境之中或者有着高性能方面的需求,那就直接选用防水无刷舵机,一步达成其实更加节省费用。
一点,是最容易被忽略,然而却又最容易出现问题的。好多朋友先选好了扭矩以及角度,可是等舵机买回来之后,才发觉,根本塞不进设计好的结构当中,又或者是太重了,直接就把机器人的重心给带往偏离方向了。那偏差还不小呢。
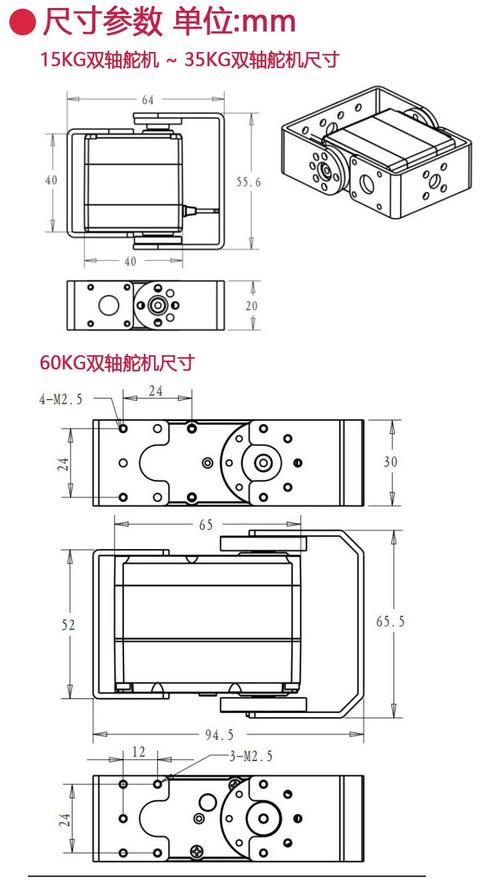
作为舵机选型而言,尺寸以及重量属于“入场券”。于设计的开端时期,便需要率先预留出放置舵机的安装空间。微型迷你舵机有可能仅重9克,它适配小型的仿生机器人;超大扭矩舵机在个头与重量方面都会大出许多,其适合底盘驱动或者工业级应用。
提议你绘制草图,不然就径直前往舵机厂家的官方网站,把对应型号的3D图纸给下载下来,接着放置到你的设计当中好好比划一番,要保证在物理层面能够装进去,只有如此才不会枉费精力。
通信协议听上去略微带点专业感,可实际上讲的就是舵机怎样去听指令这样的问题,最简单的那种PWM舵机,是借助一根信号线来实施控制的,接线的时候较为便利,然而其缺点在于,一个舵机就需要占用一个通道伟创动力,并且没办法反馈位置信息。
假设你的机器人关节数量较多,比如说拥有十几个乃至几十个舵机舵机品牌伟创动力,那么此时就需要考虑采用总线舵机,像是RS485或者CAN总线。这种舵机能够如同串糖葫芦那般,将所有舵机串联于一根线上,借助地址予以区分,并且还能够回传温度、电压、当前位置等数据,从而便于进行闭环控制。
故此,针对简单的项目而言,运用PWM便足矣,能省却不少事;而对于复杂些许、且需反馈的项目来讲,径直选用TTL串口或者CAN总线舵机,会使你的控制系统得以相当程度的简化。
面对诸多参数,想必你心里该有底了。不清楚你当下所做项目里,最令你纠结的是哪一个参数呢?是扭矩无法算准,还是接口不适配呢?欢迎于评论区留言,将你的问题讲出来,众人一同交流,回避选型之中的那些失误。倘若觉得文章有价值,别忘了点个赞分享出去,以使更多朋友得以看到!























