



























TECHNICAL SUPPORT

发布时间: 2026-02-23
嘿,朋友!近来是不是正鼓捣着啥新颖的东西,像是机器人的关节伟创动力,又或者是智能小车,再不然是想着给某个装置添加上能精准转动的那种“关节”?当要让物件精准地转动某个特定角度之际,在脑海中浮现的必定是舵机。只不过,你所购得的舵机,难道能直接插上电便畅通无阻地使用不?它是需要有一套如同“翻译官”般的东西来领会你的指令的,而这个充当“翻译官”角色的便是舵机驱动程序。好些新手朋友在起始的第一步便遭遇阻碍,原因就是压根没弄清楚这东西究竟是什么,以及究竟该如何促使它运作起来。
用较为复杂迂曲的方式来讲,舵机驱动程序是那种被编写于单片机之中包括的代码代码,像、STM32这类单片机。它宛如一座桥梁,起着连接你的构想认知,与舵机实际物理动作的作用。以你的控制器,比如开发板为例,传出“转动90度”的指示命令,然而此指令舵机却无法理解领会,它仅仅能认通电信号。驱动程序所肩负的任务呢,便是将你的高层次指令,转变成舵机能够识别分辨的、具备特定宽度的电脉冲,此电脉冲也就是PWM波,你完全可以把它想象成一种有着特定样式的开关信号。要是没有这个程序代码,舵机要不然就会一直在原地静止不动,要不然就会只是毫无规律地胡乱转动。
说来呢,给舵机撰写基础驱动,相较于所想象的情形,要简便许多,特别是在诸如这般的平台之上,一般而言,我们仅仅需借助“Servo.h”这个库文件,它宛如一个已然封装好的工具包,你只需于代码起始处将其引入,接着创建一个舵机对象舵机品牌伟创动力,再运用“舵机对象.(引脚编号)”去指明你连接了舵机信号线的引脚,最终通过“舵机对象.write(角度)”便能够让舵机转向指定角度了,这是不是有点类似发号施令呢?唯需告知其“去往何处”,至于依何“方式前往”舵机厂家伟创动力,则由库函数(即已有的驱动程序)予以协助解决。
以下是改写后的内容:这是个不错的质疑之词。这同时也是大伙极易踏入误区的所在之处。其答案是没办法一概而论的。在市面上所存在的舵机主要是区分为模拟舵机以及数字舵机这两种类型的。它们各自的驱动方式是存在着些许不同的。模拟舵机是需要不间断地发送PWM信号才能够去维持其位置的。而数字舵机的内部是设有芯片的哟 ,它是可以自行进行处理这些情况的。并且其驱动频率能够更高。更为关键重要的是。那些具备高精度的串口舵机、CAN总线舵机。它们的驱动过程会更加的复杂难办。得依据厂家所提供出来的特定通信协议才可以去编写代码的。可绝对不能够随随便便地拿个普通PWM的驱动来直接套用的。要是那样做的话,舵机根本就不会理会于你的。
如若你期望自行去设计电路板,并不依靠现成的开发板,那么就要选择舵机驱动芯片了。在此种时候,你需要犹如购买手机查看配置那般,去留意几个关键参数。是驱动电流,你要保证芯片能够输出舵机在堵转之际所需的最大电流,否则芯片就容易被烧掉。是供电电压,要使之匹配你的舵机工作电压。紧接着的是,PWM频率以及分辨率,频率对控制精度起着决断作用,分辨率决定了你能够将角度细分至何等精细程度,就像8位分辨率仅能把180度划分成256份,然而16位却能够划分成65536份,如此一来,其转动理所当然会更加顺畅。
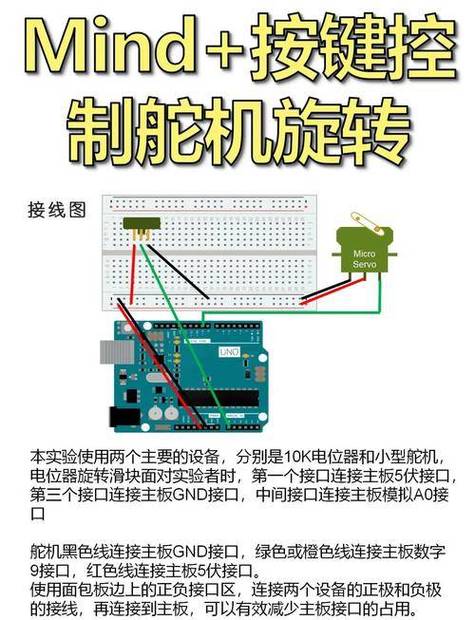
当碰到舵机不转动的情况时,咱们先别着急就去怀疑程序已然写错了,大概率是接线方面出现了差错情况。舵机一般存在三根线,电源线它通常呈现为红色,地线是棕色或者黑色,信号线则是橙色、黄色或者白色。你要像盘问户口这样子,逐个去进行确认,电源连接正确了吗,地线实现共地了吗,最为关键的是信号线,一定得连接到开发板具备PWM输出能力的引脚上,并非所有数字引脚都能够输出PWM,关于这一点你得查明白你板子的引脚定义信息。连接正确了,它才会开始有反应。
如若想要进行深入的学习,那么最好的老师实际上乃是厂家所提供的技术文档以及数据手册。举例而言,要是你购置了品牌或者其他品牌的舵机 ,那就前往该品牌的官网去寻找与之对应的产品规格书或者通信协议说明 ,在那里面存在着最为权威的驱动参数以及时序图。 ,各种各样的开源硬件社区诸如官网 、CSDN 、又或者 ,均有着数量众多的开源项目以及热心网友所分享的代码示例。查找你的“舵机型号 加上 ”,或者查找“STM32”,常常能够寻觅到现成的案例,借助别人的成果,学习起来会更为快速许多。
行了,对于舵机驱动程序究竟是什么,还有怎样能使它运行起来,我们已经聊了蛮多。不清楚你当下正在做的项目里,是初次试着使用舵机,还是在调试进程中碰到了什么具体的棘手难题呢?欢迎在评论区域留言去分享你的项目或者问题,我们一同探讨来解决。要是觉得文章有作用的话,可别忘了点赞并且分享给同样在钻研电子的朋友们呀!























