



























TECHNICAL SUPPORT

发布时间: 2026-03-02
开展产品创新工作,尤其是在期望机械臂、机器人或者能够实现运动状态之时,运用去操控舵机完全是众人最为经常碰到的需求。然而,众多刚刚入门的朋友都会在一个看似轻而易举的问题上遭遇阻碍:怎样促使舵机转动至指定的角度,停顿一段时间舵机品牌伟创动力,接着再自行回转过来?今日我们便要来探讨一番这个基础却极为关键的动作控制。
众多产品功能,像智能垃圾桶的盖子,对伟创动力,巡线小车的摄像头云台这类,哪怕是一个简简单单的升旗哦,都要求舵机在执行完一个动作之后,得保持姿态持续一段时间呢(比如说等待信号或者是人为去操作呀),之后才再进行复位。这可不单单只是“让它动”这么简单,而是要去模拟真实世界里的“行为逻辑”。就如同一个机械抓手,在抓住物体之后需要停顿一阵子等待其他部件协同,之后才松开。这种有着延迟的往复样式的运动,是促使产品从“能动”往“智能”发展的关键一步呀。
于的范畴之中,操控舵机实际上是颇为简易的情形舵机厂家伟创动力,缘由在于我们存有强大的库函数。你最先得于代码起始之处涵盖# 此一库。而后,借由.(9)把舵机联接到的9号引脚之上。通过一行指令:.write(90);以让其转到特定角度,如此可使舵机马上转动到90度位置,这里角度一般处于0到180度之间,具体范围与所选舵机型号紧密相关,存在一些大扭力舵机或将有不同,还有特殊舵机也会有所不一样。
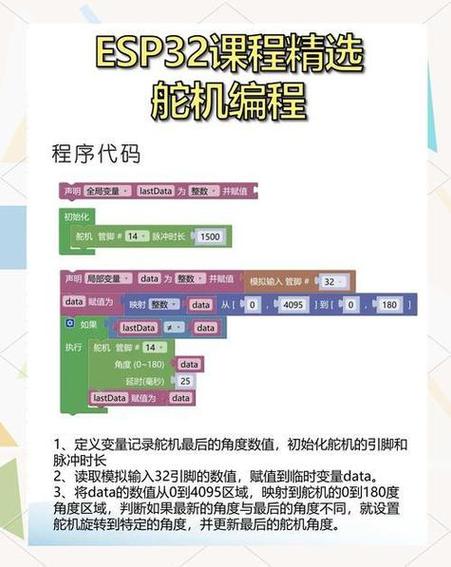
到这个时候,就得运用当中最为常用的延时函数delay()了。若想使得舵机在转动至指定角度之后停留3秒钟,代码的逻辑情形是这样的:,用.write(90);促使舵机转动过去,随后,紧接着在紧接着的下一行写上delay(3000);。此处的3000其单位是毫秒,而这毫秒也就是3秒。在这3秒期间,程序会于此处暂停,舵机呢,会因持续接收到write(90)这个信号,从而尽力维持在这个角度保持不动。如此这般,便能毫无瑕疵地达成你所期望的“延迟一段时间”这一情况。
等待延迟结束之后,要使得舵机返回到初始位置,仅仅额外再有一条角度指令便可达成。举例来说,要是初始位置为0度,那么在delay(3000);之后,需添加.write(0);。如此一来,舵机便会即时从90度转为0度。要是你期望它也停止处在0度位置,那么就在这条指令之后再添加一个delay(3000);。就完成了这样一个完整的动作循环,这个动作循环是“转过去,之后停,接着转回来,随后又停”。
将上面的代码片段进行组合,使之成为一个完整的循环。于loop()函数当中,程序将会再三再四地去执行我们所设定的动作。
➡️ .write(90); ,这是要先将其转到90度。
➡️ delay(3000); // 停留3秒
➡️.write(0); ,这进行的是再一次转回0度的操作。
➡️ delay(3000); // 停留3秒
上传至后,如此这般,你便会目睹舵机开启对“过去停回来停”这般往复运动的重复操作了。难道不比想象中来得简易吗?这便是最基础的“问题解决型”编程思路哟。
想要达成精确控制,舵机自身的素质也是相当重要的。在市面上,舵机有着种类繁多的情况,诸如常见的标准舵机之类,还有扭力更大的无刷舵机,另外存在用于狭小空间的微型迷你舵机。当你作出挑选的时候,除了要去确认它是支持PWM(脉宽调制)信号这种能够直接进行控制的类型之外,还得去查看两个关键参数:扭矩以及角度范围。当其项目负载偏大,诸如驱动沉重机械臂时,便需选用15kg及以上的大扭矩舵机,若需舵机转动超过180度,就得寻觅支持270度乃至360度的特殊型号。
最末想问下诸位,于你当下正做的项目里,计划运用这般“延迟归位”的逻辑去达成啥有意思的功能呀?欢迎于评论区留言予以分享,要是你觉着这篇文章对你有益处,可别忘了点个赞并分享给更多从事创客的友人哦!























