



























TECHNICAL SUPPORT

发布时间: 2026-03-06
那种情况你是否也曾经遇上过呢舵机厂家伟创动力,满心怀着欢喜打算将舵机安到自身的小机器人亦或是里头,然而代码一经烧录进去,舵机要不就是丝毫不动,要不就是抖得如同筛子一样,丝毫不受控制完全不予响应。明明瞅着网上教程显得挺简易的,可一旦轮到自己动手操作便出现各种各样的差错。别着急,就在今天咱们专门针对怎样借助51单片机把这个有着“执拗性子”的舵机给制服,让它能够按照指令做出精准动作。
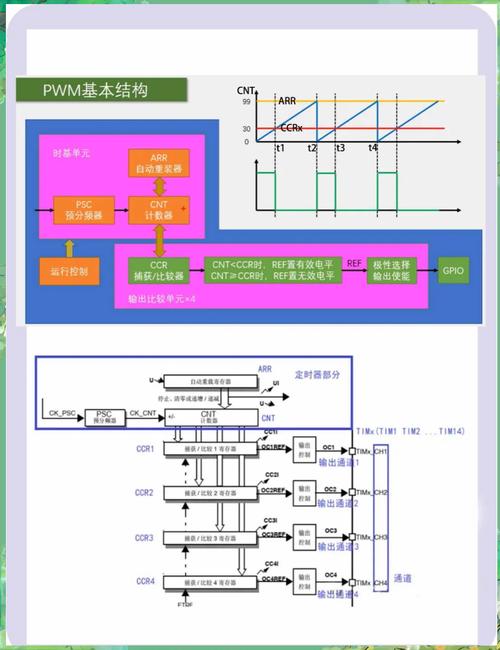
想要让舵机实现灵活运转,首要的是弄明白它究竟听从何种指令。舵机对于电压本身的高低并不识别判断,对于正负极性是否接反同样没有对应识别依据(绝对不要真的进行错误反接操作)。它唯一听从的是一种类型特殊的信号,即脉冲宽度调制信号,也就是常说的PWM信号。简要来讲,就是你的单片机需要不间断地向舵机发送得到一个具备周期性规律的高电平脉冲信号,而这个脉冲信号的宽度,也就是高电平持续维持的时长,最终决定了舵机转轴所呈现的角度。
比方说,有一个属于标准规格的舵机,它所理解得到的是,宽度为1毫秒的脉冲信号对应的是转到0度的状态,宽度是1.5毫秒的脉冲信号对应的是转到90度的状况,而宽度为2毫秒的脉冲信号对应的则是转到180度的情形。这情形,就如同是要跟舵机进行特殊的信号“对暗号”一样,你得把脉冲信号的时间把控得无比精准才行的。51单片机自身并不会具备那么多专门用于这类PWM的硬件接口,故而,咱们在很多时候都得凭借定时器中断的方式来“模拟”出能够保持精准的那种波形,这恰恰也是初学者们最容易在学习进程中出现阻碍、造成卡顿的一处地方。
既已打算开展PWM模拟,那么对于51单片机而言,定时器乃是助力不可多得的关键器件。你需将其设置为,每当历经一段极为短暂的时长伟创动力,例如0.1毫秒,便引发一次中断。此中断仿若一个小型闹钟,每回闹钟发出声响,程序便会前去查验一番,瞧瞧促使舵机的控制引脚输出高电平,还是输出低电平。
打个比方,要是你期望输出一个时长为1.5毫秒的脉冲,那么需在所连接的引脚处将其电平拉高,随后开启定时器,接着开始计数,要数够15次时长为0.1毫秒的中断。当数够既定次数后,就要即刻把引脚的电平拉低。在剩余的这段时间内,一直要到下一个时长为20毫秒的周期开启之前,引脚都维持在低电平状态。这样的一个过程听起来有点儿让人摸不着头脑,不过只要能够准确算出定时器的初值,在运行中断服务程序时借助几个标志位以及计数器变量,就能够将其中的逻辑梳理清晰。
好容易程序编写完成了,一旦接通电源,舵机抖动得好似在舞蹈,这绝对堪称能使诸多人士望而却步的一大棘手难题。这背后一般说来存在几个“有嫌疑者”。,电源供电不够充足;舵机开启瞬间电流非常大,要是利用电脑USB或者51开发板上的微弱电力直接为其供电,电压一旦下降,单片机就会复位,舵机理所当然就会失态运作;针对此状况的解决方法是为舵机专门预备一个可靠的电源,比如电池组,而且把GND与单片机的GND进行共地连接。
定时器算出的结果不准确,51单片机存在着是12M晶振,还是11.0592M晶振的情况,定时器重装值计算出现些许错误,累积起来脉冲宽度就不正确了,舵机的控制逻辑十分严谨,50Hz的频率不能随意出现差错,脉冲宽度需要精确到微秒级别,此时需要你平和心境,拿着纸笔将定时器的溢出时间计算清楚,或者充分利用好逻辑分析仪来查看实际输出的波形究竟是否正确。
要是你期望舵机能如同机器人手臂那般,从0度缓缓摆至180度,而非一下子就“咔”地弹过去,那就得在层面施展些许小手段了。你不可以直接将目标角度由0度瞬间变为180度,而是得把它细化成诸多中间环节才行。
举个例子,你能够去设定一个目标角度,接着就在主循环以内,促使当前角度一点点地去“追”上去,每当仅增加或者减小一点点,而且每20毫秒才进行一次脉冲宽度的更新。如此这般,舵机便会借助一个相对平滑的速度转动过去。这个步进值的大小对舵机转动的快慢起着决定性作用。凭借这般方式,你不但能够控制位置,还能够把控运动的速度以及轨迹,从而令作品展现得更加灵动、更为自然。
进行51单片机上的舵机控制创作时?一些惨痛的经验教训牢牢铭记。其一,中断服务程序内部绝对不要编写过长的代码,更不可调用延时函数。定时器中断是争分夺秒的,你在其中耽搁了时间,后续会导致下次中断被错过,还有脉冲波形会发生变形。一般常见的做法是,中断当中仅执行最为简单的变量计数操作,将真正复杂的逻辑判断放置到主循环之中进行运作处理。
数据类型之于变量需多加留意,计数之时的定时器存在运用无符号整型乃至长整型之情形,切不可大意致使数据溢出而搅乱逻辑,另外,设若在你的程序于所需同时对待舵机信号与屏幕显示以及按键扫描时,此刻就妥善规划时序,切莫让一项任务将另一项任务给阻塞,通过尝试用状态机的思想去编写程序,促使每个个任务皆能处于运行状态,而非处于等待状态。
淘宝闲逛之际,瞅见各类参数,脑袋都要变大,诸如模拟舵机、数字舵机、金属齿、空心杯,等等哪。针对刚着手运用51单片机进行练习的友人,提议先购置最为平常的、价格低廉的PWM模拟舵机去研习原理哪。此等舵机对于脉冲精度的容忍程度相对而言高一点哟,哪怕你的波形存在些许瑕疵,它也能够勉强转动,不容易被烧坏哪。
待你将51的控制逻辑彻底弄明白,进而再去钻研那些带有反馈的数字舵机、总线舵机。 那些高级产物固然操控起来愈发简便,然而其背后的通信协议也更为繁杂,直接着手或许会令你对人生产生怀疑。 先借助简单的来扎实奠定基础,领会“脉冲宽度决定角度”这个关键核心,后续不管更换为何种舵机,总归万变不离其宗舵机品牌伟创动力,你皆可迅速上手。
经过这么多的交流,从脉冲宽度的机理讲到定时器配置,进一步涉及抖动剖析以及程序逻辑,想必你对于运用51单片机操控舵机已然形成了一条清晰的脉络。不清楚你缔造自己首个舵机小型项目之际,计划让它运转起来去做什么呢?是一个能够摆动头部的小型风扇,亦或是一个简易的小型爬虫?前往评论区阐述你的创意吧,假如认为此篇文章有益处,可别忘了点赞并分享,以便让更多正为舵机困扰的友人看到。























