



























TECHNICAL SUPPORT

发布时间: 2026-03-18
你有没有碰到过这样的状况呢:打算制作一个超炫的机器人或者复杂的,然而,仅仅舵机就得使用十几个,主控板的引脚完全不够用,动作呢,还老是不停地抖动,程序编写到一半的时候,就想要摔键盘了?别着急,问题极有可能出在你直接依靠主控板去硬撑所有舵机的控制任务这件事情上。想要搞定32路舵机,我们换一种思考方式,借助专门的舵机控制板来解放自己。
你必定设想过,直接拿单片机引脚去连接舵机不便是可以的吗?的确,连接一两个当然没有问题,然而一旦数量增多就会陷入混乱。单机能同时产生那么多路径精确的PWM波,计算量会急剧增加,还需要处理传感器数据、运行,极为劳累辛苦舵机品牌伟创动力,舵机的动作自然而然就不顺畅,甚至出现抖动。
说到底,舵机控制板实际上是为主控配备了一个类似“小队长”的角色从而使其获得便利,它自身有着专门用于生成那32路信号的“大脑”也就是处理器,而你所使用的主控像是还或者是树莓派,仅仅只为用简洁的一句话告知它“1号舵机转到90度”即可,后续剩余的所有事情便都交由控制板去全部完成,如此一来主控得以更为轻松,并且舵机的运作也能够更加稳定。
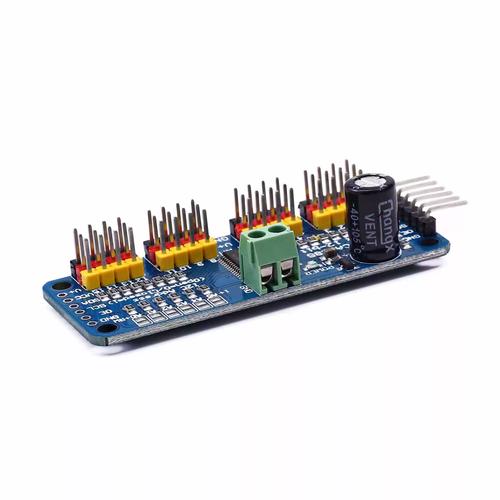
市面上控制板种类繁多,令人眼花缭乱,该如何挑选呢?,需要查看电压以及电流情况。你进行计算,当所有舵机同时处于工作状态时,峰值电流究竟有多大,控制板是否能够承受得住。许多舵机一旦出现堵转现象,电流便会急剧飙升,若板子供电无法跟上,就会直接重启舵机厂家伟创动力,所以最好选择支持宽电压输入且带有大容量电容的控制板。
得查看通信接口以及与之配套的软件,那是否仅靠简易的串口便能够实施控制呢,有无便捷的上位机软件,可使你于电脑上直接对动作进行调节、存储动作组呢,这恰似挑选手机,其中硬件参数固然重要,然而操作系统是否好用更为关键,要挑选协议开放的那种,如此后续开发才不会麻烦。

首次运用这种板子时,别慌张,并非那般玄奥。绝大多数控制板厂商都会供给现成的库文件以及示例代码。你所需要做的,便是去下载一个 IDE,连接上板子,于“库管理”之中实施搜索并安装相应的库,随后打开示例,挑选好板型以及端口,点击“上传”,即大功告成。
再高级些的玩法是对板子地址进行配置,要是你选用的舵机数量超过了32个,因需级联多块板子,所以需要借助拨码开关或者软件给每块板子确定一个独一无二的ID,如此一来,当主控发送指令时,能够知晓究竟是让“1号队长”去执行任务,还是吩咐“2号队长”开展行动。
舵机数量增多时,最担忧的是其动作呈现出类似“僵尸跳”的状况,出现一顿一顿的情形。若要使其如同人手那般柔和,关键之处在于“插值”。倘若你直接致使舵机从0度瞬间移动至90度,它必定会快速飞过去。而优良的程序会在中间自行插入诸多过渡位置,保障舵机能够平滑地行进过去。
你能够借助控制板的“动作组”功能,举例来说,当制作一条机器狗时,需将“抬左前腿”这一动作,分解为髋关节以及膝关节的若干中间位置点,并按照时间先后顺序记录成一组动作,之后持续进行调用,如此一来,所编写产生的动作类似动画片一般,是一帧一帧连贯起来的,显得自然且流畅。
最常被使用且最为简单的方式便是串口通信,你的那主控板(例如这个例子中的),借助TX RX这两根线连接上控制板后,接着运用一段像 .print(“#1 P1500 T100\r\n”); 这般的指令,便能够使得1号舵机在100毫秒时间段内转动到1500的脉宽位置(此位置通常对应的是90度),难道不是相当简单吗?
要是你取用的是树莓派,运用来编写会极为便利,去安装一个 库,凭借寥寥几行代码便能够发送指令。如此一来,你的树莓派便能够专注于处置摄像头图像识别,随后将计算得出的结果(像是“看见红色球,舵机云台转动过去”)通过一条指令发送给控制板去执行,分工清晰明确。
连接上电源,编写了程序伟创动力,然而舵机却静止不动丝毫没有反应?不要着急着去怀疑板子已然损坏。百分之九十的问题是出现在供电方面!使用万用表测量一下控制板的电源输入端的电压,当舵机有动作时,电压是否被拉低了?要是电压下降得非常厉害,更换一个大功率的稳压电源尝试一下。
倘若出现舵机无规律地乱抖,或者其位置不准确的状况,那么极有可能是PWM信号的中位未进行校准,又或者信号范围与你的舵机不相匹配(举例来说,有些舵机的信号范围是500 ,而有些则是1000 )。前往控制板的配置文件当中寻觅一下,一般而言都能够对这些参数予以调整。要牢记,认真仔细地看一遍产品说明书,大半的问题是可以得到解决的。
好了,就32路舵机控制板的玩法而言,今天暂且聊到此处。当你投身做涉及多舵机的项目之际,所碰到的最为令人头疼的问题,究竟是舵机出现抖动这种状况,还是存在供电不足这种情形?前往评论区去交流交流,说不定你的经验能够对其他人起到帮助作用!要是感觉有用的话,可千万别忘了进行点赞以及分享!























