

























TECHNICAL SUPPORT


-
{notrans}
{/notrans}
- {notrans} China-中文简体 {/notrans}

发布时间: 2026-03-23
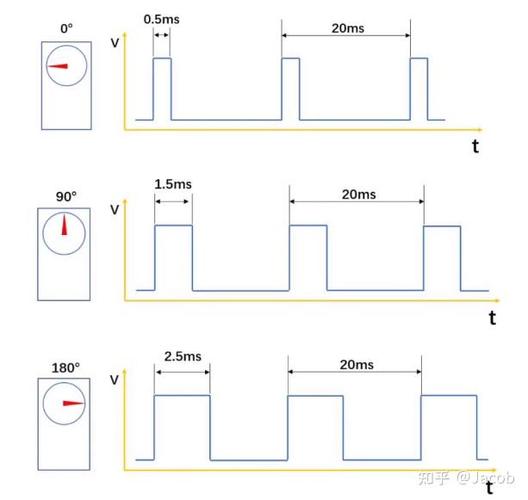
初涉舵机的众多朋友会碰到此问题:期望它缓缓旋转,但信号一给,它便瞬间抵达位置,动作极为生硬。实际上,关键并非舵机自身,而是所发送指令的设计方式。一般而言,要使舵机达成缓慢转动,并非考量其单次转动角度,而是借由持续发送微小角度指令,使其每次仅移动少许,累积后便构成流畅的慢速运动。此“少许”通常控制于0.5度至5度之间,具体依效果需求与舵机类型而定。
舵机内部电机转速恒定,你给予其目标角度,它会以自身最快速度冲过去。直接令舵机从0度转至180度,你所看到的便是一个快速甩头动作,根本无法慢下来。这便是为何你欲实现缓慢转动时,改变控制策略。运用程序将大角度拆分为诸多小步,每步之间添加短暂延时舵机厂家伟创动力,好似用众多小台阶铺就一条缓坡舵机品牌伟创动力,动作自然而然就慢下来了。
这个问题事实上不存在固定答案,得看你所使用的是何种舵机。举例来说普通数码舵机,它每一次能够响应从0.5度至1度这样的变化,此种精度足以做出极为细腻的动作。然而要是你运用的是无刷舵机或者总线舵机,它们内部具备更为精细的位姿控制,每一回能够控制0.1度甚至更小的角度。在实际项目当中,你能够先设定一个中间值,像是2度,查看一下动作效果伟创动力,接着依据是“不够平滑”还是“反应太慢”来进行上下调整。
最直观的好处便是动作质感全然不同,设备运行起来已不再是那种生硬的机械那般感觉,而是如同专业设备一样典雅、可操控。就像机器人手臂、云台或者智能展台上这些情况,慢速转动能够带来更为平稳的视觉感受,还减轻了对齿轮组的瞬间冲击,进而延长舵机寿命。除此之外,慢速控制常常意味着能够更精准地停在某个位置,这对于需要精确定位的应用来讲极为关键。
讲真这个着实蛮容易,极为常用的便是采用for循环,比方说你期望舵机自0度转至180度,总共耗费10秒。对此你能够先进行一番计算:以每次转动1度来假设,总共需要180步,每步之间的延时便是10秒除以180,大概是55毫秒。随后于循环之中每次递增1度,等待55毫秒,接着推移至下一个角度。倘若你运用的是或者单片机,如此编写而成的代码也就十来行。当然了,要是采用的是总线舵机,它本身就支持调速指令,那就更为简易,直接设定转速便可。
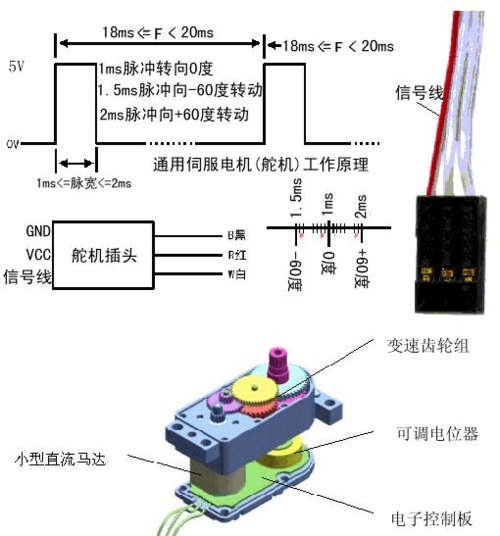
此刻市面上舵机种类繁杂多样,要是你打算频繁开展慢速精准操控,千万别选用普通的PWM舵机,因它的精度以及稳定性受电压的影响颇为显著,并且极易产生抖动现象。不妨考虑那些带有RS485或者CAN总线的智能舵机,像是能够反馈角度的高压无刷舵机,它们内部具备闭环控制,能够平稳地依照你所设定的速度运行,根本无需担忧丢步或者过冲情况。另外,留意查看一下舵机的角度范围,存在0到180度的,也有0到360度甚至于多圈可控的,选择哪一种完全取决于你的动作行程需求。
我见识过诸多饶有趣味的应用,像是有个擅长智能展示的友人,借助舵机操控展台上的产品缓缓转动,每隔5秒转动0.5度,用以打造出一种颇具高级感的展示氛围;另外还有从事机械臂创作的创客,运用总线舵机使每个关节皆以极为缓慢的速度同步开展动作,所拍摄出来的演示视频极具科技感。你自身于项目里实际上也能够尝试一番,例如给相机云台增添慢速扫描功能,或者操控一个小型机器人缓缓转头与人展开互动,这些细微之处均能够让产品的使用体验提升一个层次。
你在实际项目里头,可曾碰到过舵机控制时,出现那种“要么速度过快、要么干脆一动不动”这般尴尬的状况呀?要是此刻正寻觅恰当的舵机型号,那不妨前往我们的官网瞅瞅,瞧瞧不同系列之间的参数对比情况,特别是无刷舵机以及总线舵机的速度控制功能,说不定这能帮你省下好多调试所耗费的时间呢。






















