



























TECHNICAL SUPPORT

发布时间: 2026-04-17
调试机器人关节之际,因舵机型号选错,致使项目整体响应延迟,好多开发者都碰到过类似困扰。制作机械臂也好,制作机器人也罢,或者制作航模,明确舵机的型号分类以及对应参数伟创动力,乃是保障项目稳定运行的根基。本文汇总了当下主流的舵机类型,还有型号命名规则以及核心性能参数,助力你迅速定位所需产品。
在进行选型之前哩,要先弄清楚以下这五个处于核心地位的参数哟,正是它们成为了可以用来判断舵机是不是适用的具有黄金般价值的标准呐:
1. 扭转之力(千克乘以厘米 单位):对舵机经由何种重量给予动力起着决定的作用 具体而言 某一特定的 二十千克乘以厘米的舵机 在一厘米的力臂长度的如此状态底下 能够实施拉动二十千克重量之物体的这般行为。
2. 转速,其单位为(s/60°),它所表达的是舵机转动60度时,所需耗费的时间,这个时间的单位是秒,数值越小,那么其响应的速度就越快。
3. 工作电压,其单位是伏特,也就是V,常见的范围处于4.8V至8.4V之间,电压要是越来越高了,一般情况下,扭矩以及转速也就会随之越大。
4. 控制协议,主流存在PWM ,也就是脉冲宽度调制 ,还有TTL串口 ,以及RS 485 ,另外还有CAN总线等。PWM适用于简单航模 ,总线控制适用于多关节机器人。
5. 存在两种齿轮材质,一种是塑胶齿,其具备静音、价格低廉以及容易损坏的特性,另一种齿轮材质为金属齿,它有着耐磨、能够承受大扭矩以及寿命长久的特点。
下表涵盖了目前90%以上常见应用场景的舵机选型需求。
常见型号:SG90、MG90S
核心参数:
尺寸:23×12.2×29mm
扭矩:1.8kg·cm (4.8V)
转速:0.12s/60° (4.8V)
电压:4.8V 6.0V
齿轮:SG90为塑胶齿,MG90S为金属齿
控制协议:PWM
特征为,体积微小、成本低廉,适宜于入门级别的项目以及轻负载的场景。留意,SG90在出现堵转情况时万分容易出现扫齿现象,千万不要将其应用于承受力的关节处。
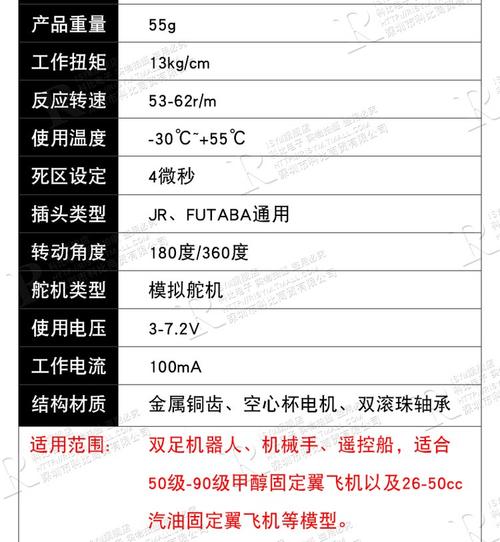
包含的常见型号有,被称作MG995的,还有名为的,另外叫做的,以及称为JX 5521的。
核心参数:
尺寸:40×20×38mm(标准尺寸)
,其扭矩在6V时为11kg·cm,在7.4V时为13kg·cm,转速是0.14s/60°。
(高压版),有着这样的数据,扭矩在6V时为15kg·cm,在7.4V时为20kg·cm,并且采用的是全金属齿轮。
电压,为4.8V至7.4V,此乃标准版,而后,还有6V至8.4V,这是高压版。
控制协议:PWM
特性:具备最为通用的尺寸规格,在替换方面较为容易。选型提议:MG995存在较多假货,优先选择或者DS系列。
一般常见的型号有,具有特定标识的,有着别样标识的,带有独特标识的,以及属于32kg级的数字舵机。
核心参数:
尺寸:40×20×38mm 或 40×20×40mm
这个型号是 ,它的扭矩是23kg·cm即在7.4V的情况下,堵转电流为2.5A ,外壳采用全铝制成 ,且支持PWM以及RS485还有TTL。
这是型号与,其扭矩为18.5千克厘米,对应电压是7.4伏特,具备支持PWM的特性。
电压:4.8V 8.4V(高压版)
转速是,在6V的情况下,为0.18秒每60度,在7.4V的情况下,为0.16秒每60度。
控制协议:多为PWM,高端型号支持RS485/TTL总线
特点:所采用的是不带有电刷的电机以及全部为金属材质制成的齿轮,其具备着使用寿命长久的特性,并且在运行过程中产生的热量较低。关键点:需要配备与之相对应的、电压在6V以上的高压电池或者是具备稳压功能的模块。
常见型号:SC系列、ST系列、AX/MX系列(串口总线)
核心参数:
尺寸:34×15×28mm(如)
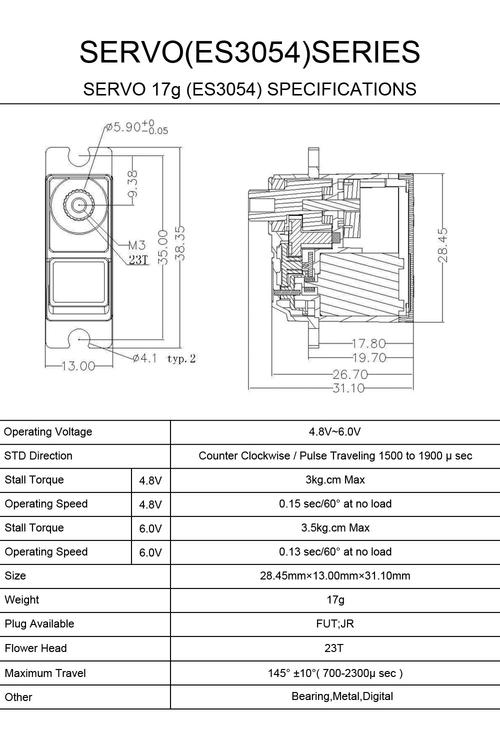
,其扭矩为3.3kg·cm ,这是在7.4V的情况下,它的重量是30g,控制协议是TTL。
扭矩范围:3kg·cm 40kg·cm以上
控制协议:TTL串口、RS485、CAN总线
反馈功能:位置、速度、温度、电压、电流实时回传
特征:有着支持串联控制的特性,并不需要针对每个舵机去单独进行接线操作,具备能够读取多维度状态的能力。 挑选型号的关键所在:要去确认主控板是不是对相应的总线协议予以支持(就像Half UART这样的协议)。
1. 根据负载重量与力臂长度相乘之后再乘以安全系数(安全系数为1.5至2倍之间)来计算所需扭矩,举例说明,若有5kg的负载,力臂长度为10cm,那么至少需要5kg乘以10cm再乘以1.5,结果是75kg·cm?需要注意的是,在进行实际计算时,舵机扭矩的单位是kg·cm ,要是力臂为10cm,负载是5kg,那么所需的最小扭矩就是5kg乘以10cm,得出的结果是50kg·cm。安全推荐值为75kg·cm。
2. 对物理尺寸予以确定:针对安装舱位的长、宽、高展开测量。对于标准舱位而言,选取40×20mm的舵机;而微型的则选取23×12mm的。
3. 若要抉择控制协议,当关节数量为1至2个且不进行数据反馈时,应选取PWM;要是关节数量超过3个并且需要位置闭环,那就选择TTL/RS485总线舵机。
4. 仔细核查电压以及电流,要保证供电系统能够给出超过堵转电流两倍的瞬间电流,比如说堵转时电流为2.5A,那么电源能够支撑5A的峰值。
案例1:存在开发者为机器人腿部挑选了9g塑胶齿舵机,随后落地刹那因冲击电流致使齿轮崩裂。结论:全部受力关节(特别是腿部、大臂部分)都得使用金属齿舵机,并且扭矩余量不少于计算值的1.5倍。
案例2呈现出这样的情况,该项目运用了5个总线舵机,然而仅仅采用了一个输出为1A的稳压模块来供电,如此一来便致使在多舵机同时进行动作的时候,电压急剧下降,进而使得主控重新启动。得出的结论是,总线舵机系统的总电流等于单舵机堵转电流乘以舵机数量再乘以0.6(此为同时工作系数)。对于5个堵转电流为2A的舵机而言,起码需要具备6A的持续供电能力。
1. 我们要优先去核对参数表,在下单之前,一定要去确认商家所提供的三项数据,这三项数据分别是“尺寸图”,还有“扭矩 电压曲线”,以及“空载转速”。
2. 起始于常见的型号来着手:对于新手而言,优先去选用(标准之场景),要不便是以(需为高压之场景这个情形当中)作为选择,这两种型号在市场上所拥有的保有量是比较大这件事不容置疑伟创动力舵机,并且其有关技术方面的支撑以及替换方案是成熟的这种状况不假。
3. 总线舵机,先进行通信测试:在购买智能总线舵机之后,运用厂家所提供的测试软件以及USB转接板,去验证通信协议,接着将其集成到主控代码当中,如此能够避免90%的通信调试相关问题。
归结而言:舵机选型的实质是针对扭矩、尺寸、控制方式以及供电能力所做的平衡。不存在“万能舵机”,仅有“最契合项目需求”的型号。要牢牢记住“扭矩计算优先、金属齿优先、电压匹配优先”这三个原则,如此便能避开绝大多数选型陷阱。























