



























TECHNICAL SUPPORT

发布时间: 2026-04-21
不管您正处于组装机器人的进程中,或者是在调试机械臂,又或者是制作航模,再或者是打造智能小车,挑选一块恰当的舵机驱动板时,核心方面聚焦于匹配舵机的类型,以及电压,还有电流,以及控制协议。若有所使用的驱动板不合适的话,程度较轻的状况会致使舵机出现无力、抖动的现象,程度较重则会造成舵机被烧毁,或者控制板被烧毁。
此处为您呈上一套清晰的、能够立即被执行的舵机驱动板选择方案,它覆盖了从单个舵机直至多路总线舵机的全场景需求,并且所有信息都是基于公开技术规范以及行业通用标准而来的。
在去进行选购驱动板之前,要把舵机所属品类先确认明白,该确认工作是所有后续选择得以开展的根基所在,而错误率处于最高程度的环节也正是在这个确认步骤这儿。
普遍存在的误区在于,好多用户运用 UNO直接去驱动多个具备大电流的舵机,进而致使板子复位或者舵机出现无力的状况。这是由于板载的5V稳压芯片,其最大输出电流平常是不足1A的,没办法去满足2个以上标准舵机同时进行动作的需求。正确的做法是,采用独立的舵机驱动板,从电池那里获取电力供应。
这属于保障系统稳定运作的关键计算,遗漏这一步为造成项目失败的主要缘由。
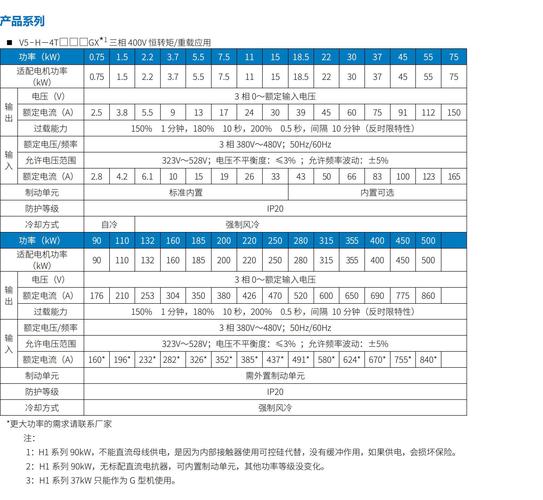
1. 电压匹配:
查阅您的舵机数据手册,找到额定电压(如6V、7.4V)。
和此保持必需一致的是驱动板输出端的电压。多数舵机驱动板对外部电源输入予以支持,其输出电压是由您所提供的外部电源来决定的。
规则:驱动板的输入电源电压,处于舵机所允许的范围之内,一般而言,要比额定电压高0.5至1V,以此来补偿线路损耗。
2. 电流计算:
舵机堵转的时候会产生电流,这个在遇到阻力或者启动瞬间产生的电流是啥样的,是每个舵机在此情况下出现的最大电流,它通常到底有多么强,最大电流通常为额定电流的2 3倍。标准舵机堵转电流大约是多少,标准舵机堵转电流约0.8 1.5A,总线舵机或者大扭力舵机的堵转电流又到什么程度,总线舵机或大扭力舵机可达3 8A。
总需求电流等于,同时动作的舵机数量,乘以单个舵机堵转电流,再乘以0.7,此为经验系数,并非所有舵机同时堵转。
致使六个标准舵机运行。单个出现堵转时电流为一点二安,总体需求约等于六个乘以一点二安再乘以零点七差不多约为五安。您得要有一块能够稳定地供应最低五安电流的驱动板也就是或者额外连接五安以上的开关电源或者电池。
驱动板跟控制板之间存在通信方式,像、ESP32、STM32、树莓派这些,其通信方式对选型范围起到了决定作用。
I2C接口(最常用):
仅需两根信号线(SDA、SCL)即可控制多达64块驱动板。
适合引脚资源紧张的控制器(如ESP32、树莓派)。
此代表方案为,基于芯片的PWM驱动板,该驱动板有16路电路,在市面上是最为常见的,其代码库也是成熟的。
UART/串口接口:
使用RX、TX两线,通常用于总线舵机驱动板。
有多块板,能直接驱动多个总线舵机伟创动力,可自动分配ID,还可反馈位置以及温度和电压等数据。
具体的代表方案是,存在着各类总线舵机专用的控制器,这些控制器当中具体包含了,像是支持协议的也或者兼带有某种兼容性协议的驱动板式装置。
直接PWM接口:
对于每个舵机而言,其都会占用控制器的一个PWM引脚,其中,此控制器是直接产生着PWM信号的。
有一个优点在于不存在驱动板成本,然而却存在缺点,其一为会占用数量众多的引脚,其二是控制器软件所承受的负担较重,其三是没有电源管理。
仅建议在舵机数量≤3且电流很小(<1A)时使用。
根据以上三步得出的参数,您可以在下表中快速定位所需类型。
请按照以下顺序回答“是/否”:
1. 您所拥有的舵机,是不是对总线协议予以支持呢,像是类型的,还有串口协议这个类别能否支持呀?
前往直接选购对应品牌或者兼容该协议的总线舵机驱动板,要留意电压以及电流满足总线上所有舵机加起来的数值,总线驱动板一般带有反馈以及ID配置,在选型的时候要优先去确认软件库是否支持。
否 → 进入下一步。
2. 您的舵机数量是否大于4个?
首选的是,16路PWM驱动板(以为核心)。其为通用性最为广泛、成本最为低廉、最为稳定的方案之中的一种。将电池或者稳压电源外接至驱动板的V+端子,切不可由控制器获取电力供应且不要从控制器取电。
否(≤4个) → 进入下一步。
3. 您所使用的控制器引脚,其数量是否充足呢,也就是剩余的、可以使用的PWM引脚,要大于或等于舵机数量乘以1?
是(充足)且总电流<2A → 可以直接使用控制器的PWM引脚驱动,但为舵机单独供电(控制器与舵机共地,但舵机电源接外部电池)。
若不是(引脚处于紧张状态或者存在需要软件进行简化的情况),那么同样地会推荐小体积的多路PWM驱动板(像是8路迷你版这种),或者单路/双路的外接驱动模块。
问题1:舵机抖动或不受控
产生原因进行排查,其中百分之九十是由于电源处于不足的状态,而剩余的百分之十则是信号干扰,或者是地线环路所导致的。
处理办法如下:其一,运用具备更高放电能力的电池,像是用航模电池去替换干电池;其二,于舵机电源的正负极之间,并联上一枚100至470μF的电解电容;其三,保证控制板的地与驱动板的地,实现单点共地。
问题2:多路舵机同时动作时,部分舵机不动
原因:驱动板瞬间电流过载,或外部电源电压被拉低。
处理:①于软件里增添舵机启动延迟,此启动为逐次进行,间隔时间在二十到五十毫秒之间。②替换为功率更大的电源,比如说采用十二伏转六伏的十安稳压模块。③添加大容量的电容组,电容容量达数千微法。
问题3:总线舵机无法识别ID
原因:未使用专用的总线配置工具或软件。
需解决的是,总线舵机出厂时的ID一般是1或者254 ,要借助对应的USB转串口的适配器与官方配置软件(像是 或者开源库)逐个进行扫描,进而修改ID,以求保证同一总线上的ID不会出现重复。
问题4:驱动板发热严重
原因:持续电流超过驱动板或稳压芯片的散热能力。
应对办法如下:其一,增添散热片或者主动风扇;其二,把PWM频率调低(标准舵机通常范围是50至330Hz,频率过高会致使发热增加);其三,替换带有过流保护并且内阻更低的工业级驱动模块。
在您下单购买之前,请逐项确认以下内容:
舵机数据手册,我已对舵机的工作电压范围(V)予以确认,与此同时,也对其堵转电流(A)进行了确认。
[ ] 总电流预算情况是,我针对所有舵机同时运作时的最大电流(A)进行了计算,而后预留出了30%的余量。
在电源方案方面,我所准备的是,存在这样一种情况,要么是电池伟创动力舵机,其额定电流是大于总需求;要么是稳压电源,并且该稳压电源的电压是匹配的。
将舵机类型区分为PWM型与总线型,依据舵机数量,从中选拔出与之对应的路数的驱动板,此即为驾驶板所属之范围。
[ ] 通信接口:我的那个控制器,对该驱动板的通信协议(I2C/UART/直接PWM)是予以支持的,并且存在现成的软件库。
我购得了应用于电源滤波的1000μF/16V以上的电解电容,那属于备用电容。
核心结论再度重复:挑选舵机驱动板的实质并非“哪家品牌更为优质”,而是“舵机电气参数、其数量以及控制协议”这三者与驱动板能力的严谨适配关联。电源乃是绝大多数问题产生的根源所在,优先去解决供电能力问题,成功概率便能够提升80%。
对于极少数并非首次制作机器人或者机械臂的用户而言,若使用高于6个标准PWM舵机,最终建议则并非直接选择一块基于芯片的16路PWM驱动板,搭配3节18650电池(串联约12.6V)和一个可调降压模块(调至6V输出,电流能力≥5A),因为这并非是最稳妥、成本最低、资料最全的起点,而是另有其他选择。,使一套极小的系统,也就是包含一个舵机以及驱动板,还有电池的系统,开始运转起来,然后,再去扩展其余的部分。























