



























TECHNICAL SUPPORT

发布时间: 2026-04-23
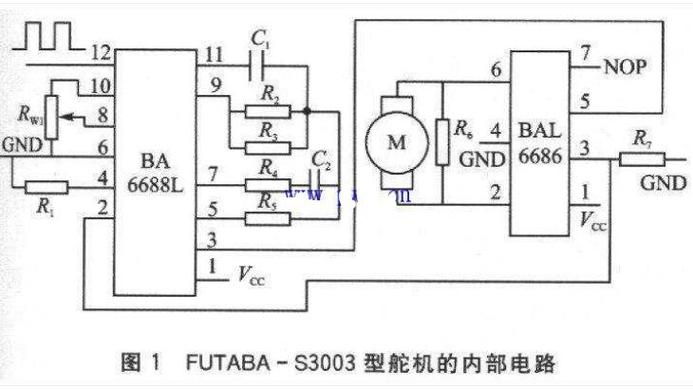
当你拿到一个舵机,面对其电路图,或者面对其背后的三根引线时,最核心的需求便是,搞清楚每根线所具有的作用,然后是知道怎样正确地把它连接引入到控制系统之中,进而能使得舵机依照要求进行转动。本文将会直接围绕这一核心要点,为你拆解标准舵机电路图的构成情况,以及每部分所具备的功能,还有最稳妥的接线方法。
不管是何种型号以及品牌的常见舵机,像是用于航模的舵机,还有用于机器人关节的舵机,其内部电路图均遵从高度一致的标准架构。弄明白舵机电路图,从本质上来说,就是弄明白以下五个核心功能模块:
1. 电源电路
2. 信号输入与整形电路
3. 控制芯片(MCU)
4. 电机驱动电路(H桥)
5. 位置反馈电路(电位器)
下面我们逐一解析每个模块在电路图中的标识、作用与关键参数。
在舵机电路图上,这是最基础的部分。
红线,也就是 VCC,它要连接至外部电源的正极,此乃舵机电机以及控制电路进行工作时所需的能量来源。
标准电压,绝大多数标准舵机运用4.8V至6.0V直流电源,高压舵机有可能支持7.4V或者更高,具体的情况肯定得去查阅该舵机的官方数据手册()。
核心谨慎要点为,在尚未确认电压范围时,绝对禁止直接接入高电压,不然就会即刻致使内部驱动电路被烧毁。
棕色或者黑色的线,也就是GND,它要连接到电源的地线,以及控制信号的参考地。它和控制器,像是单片机的GND处于共地状态,这样信号才能够正常进行传输。
这算得上是控制指令的入口之处,在电路图之上一般会被标注成 PWM 信号输入,而 PWM 代表着 Pulse Width ,也就是脉宽宽度调制。
外观标识:橙色或黄色线。
它正常的工作原理是这样的,控制信号是一种方波伟创动力,这个方波的周期是固定不变的,一般情况下是20ms,也就是频率为50Hz,通过对高电平的脉宽加以改变,可以决定舵机转动的角度,这里所说的脉宽也就是脉冲宽度。
标准脉宽与角度对应关系:
0.5ms 脉宽:最小角度,通常对应 0°(或90°)
1.5ms 脉宽:中间角度,通常对应 90°(或 0° 中位)
2.5ms 脉宽:最大角度,通常对应 180°(或 +90°)
电路里存在着整形方面的作用,部分舵机的电路图当中,在PWM信号的入口地方,会有这么一个整形电路,它的用途是用来滤除掉干扰,以此保证能够有干净的信号进入到控制芯片,进而发挥其应有的功效。
电路图中最重要的IC(集成电路)芯片。
关键功能为,对源自信号线的PWM脉宽予以解码,将其与位置反馈电路回馈回来的当下实际角度电压数值展开对照。依照其间的差值,向电机驱动电路输出正向转动或者反向转动的控制指令。
起关键作用的标识,常常被标记为“MCU” ,或者被这样指示说“IC” ,要不然就是显示成为确切代表型号的样子,就像那比如说 “KC 2468”这类般的情况。应紧跟在这句话的后面呀。
位于控制芯片和直流电机之间。
功能:依照控制芯片给出的指令伟创动力舵机,促使直流电机朝着正方向转动或者朝着相反方向转动,并且对它的转动速度予以控制。H桥电路能够让电机两端的电压极性产生改变,进而达成转向控。
能够经常见到的元件,此元件一般是由2对,也就是总共4个功率三极管,或者是管组合而成的。
电路图上,存在着常见的标注,这种标注所涉及的内容,有可能会被绘制成为一个集成模块,或者是由分立元件所构成的桥式结构。
这是舵机能够“锁定”在特定角度的关键。
元件组成包括:一个具备精密特性的电位器,其一般是直接做连接处理,连接的对象是舵机的输出 轴,或者是一级起到减速作用的齿轮。
其工作原理是,舵机轴转动之际,电位器阻值会跟着线性改变,进而输出一个在0V到 参考电压 之间变动的电压值给控制芯片,此电压值精准对应输出轴当下的绝对角度。
呈现典型故障的点在于,那电位器由于历经了长时间的磨损状况或受到震动致使阻值处于不稳定状态,这是舵机出现抖动,以及无法回归到中位这种情况的常见缘由。
倘若领会了电路图,那么实际进行操作接线就会变得径直且明晰。请依照以下这般的 “最短路径操作法”:
步骤一:准备必备工具
1. 待接线的舵机一个。
2. 兼容的直流稳压电源或电池(电压需匹配舵机)。
3. 用于产生PWM信号的控制板,比如像这种类型的单片机开发板,还有STM32这种类型的单片机开发板。
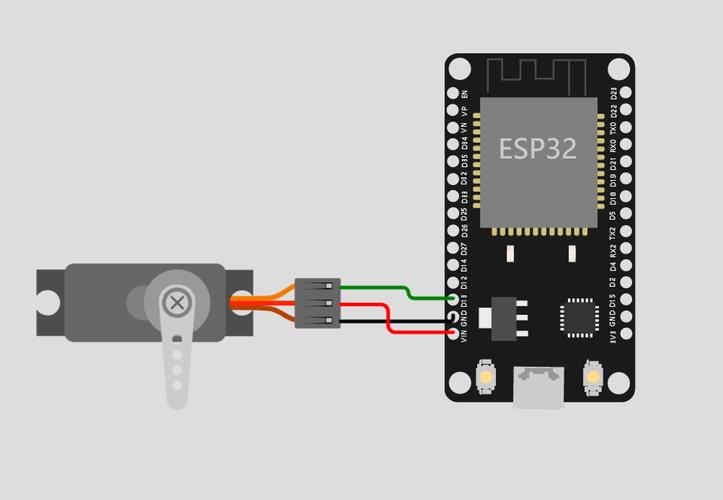
步骤二:执行“三线连接”
接线时,要把舵机的引线,与控制板相连,还要与电源相连,连接的方式是这样的:这是标准舵机唯一正确且通用的接线方法,是这样的:
步骤三:上传测试代码
给控制板传送一个简单PWM信号,该信号能输出一种情况,其周期是20ms。并且,这个信号的脉宽在一种范围里变化,这个范围是从0.5ms到2.5ms。要是舵机跟着转动,那么接线以及电路功能就全都正常。
要是你的舵机处于不工作的状态,或者呈现出异常的情形,借助上述所提及的电路图逻辑,能够迅速地定位问题所在:
有着故障现象,依据电路图剖析的可能缘由,具备。
: : : |
其中一种情况是,舵机呈现出完全没有任何反应的状态,而导致这种状况出现的原因之一,存在一种可能性,那便是电源电路处于断路的情形,具体表现为红线或者黑线出现了接触不良的现象。
2. 电源电压过低或过高(超出驱动范围)
3. 内部电机驱动电路烧毁 1. 检查红、黑线连接是否牢固
2. 用万用表测量红线与黑线间的电压,确认在标称范围内
3. 闻是否有烧焦味,若有则可能需更换舵机 |
舵机出现剧烈抖动的情况,或者舵机无法抵达指定位置 1. 信号线存在接触不良的状况,或者信号线受到干扰。
2. 位置反馈电路(电位器)故障或磨损
3. 处于控制状态的芯片的地线跟电源的地线之间存在着压差,针对这种情况,要去检查橙色与黄色线条的连接状况,还要试着缩短信号线路的长度。
2. 清洁或更换内部电位器(修复复杂,通常建议替换舵机)
3. 确保控制板GND与电源GND牢固连接在一起 |
1. 舵机仅仅朝着单一方向转到尽头,2. 是因为控制芯片没有接收到成效显著的那个脉冲宽度调制信号,即信号线处于断裂状态。
2. 其中一个处于电机驱动电路里的MOS管出现了击穿状况(这种情况常常发生在H桥那里),去检查PWM信号输出引脚和其连接线。
2. 用示波器检查PWM波形是否正常(幅度、周期、脉宽) |
有这样一个案例,你在调试一个机器人关节的时候,发现舵机偶尔会出现不响应指令的情况,可是当用手轻轻触碰接线之后,它又恢复到正常状态了。这属于典型的连接器接触不良问题,该问题对应的是电路图里电源或者信号线进入舵机电路板的焊点出现虚焊现象,又或者是插头松动了。解决这一问题的方法是重新插拔并且固定连接器,或者对电路板上的对应焊点进行补焊。
案例二:运转之时,你的舵机发出“嗡嗡”声响,然而输出轴却未转动,并且外壳发热。一般来讲,这表明电机驱动电路(H桥)已然向电机供应电力,不过电机转子被卡死。缘由或许是减速齿轮损毁卡死,又或者是电机驱动电路里的某个元件持续导通致使堵转。马上切断电源,检查齿轮组。
要安全、快速地掌握舵机电路与接线,请执行以下两步:
1. 首要行动是查证数据手册,在连接任何舵机之前,借助舵机外壳上的型号,比如说“MG995”、“”,在网上搜索“ [型号] + ”,进而下载官方数据手册,一定要确认其工作电压范围、PWM信号规格,也就是周期和脉宽范围这三项核心参数,这可是避免硬件损坏的最高准则。
2. 先是要进行标准操作,操作内容为,先去连接电源以及地,之后才去连接信号:在当下实际的接线过程当中,始终就要严格依照这样的一项先后顺序来进行操作,即红色(也就是VCC),然后是棕/黑色(也就是GND),紧接其后的是橙/黄色(也就是PWM)的顺序。而当进行拆除操作的时候,那么就要按照与上述顺序相反的去操作了。就是处在这种顺序之下,能够在最大的程度之上避免静电或者是冲击电流对控制芯片造成损坏,从而起到保护作用。
核心观点:任何标准舵机电路图都统一于“电源控制反馈驱动”的闭环结构。理解这个通用,你就能解读所有同类舵机的电路图,并能独立完成正确接线与常见故障的排查。下一次面对任何陌生舵机,你唯一需要做的,就是找到它的官方数据手册,并严格遵守本文所述的接线顺序和电压规范。























