



























TECHNICAL SUPPORT

发布时间: 2026-04-28
你是不是正着手搭建一个机器人项目呀,在这个项目里需要一并控制多个舵机伟创动力舵机,然而却不清楚该从哪里开始着手呢?在搭建的过程当中常常会出现这样子的情况:有一位机器人爱好者买下了32路舵机控制板,可是却发觉面对着32个接口以及复杂的软件,根本不知道该怎么去操作,最终使得项目陷入了停滞的状态。这篇文章将会直接把这一问题给解决掉,提供从供电开始,一直到接线,再到编程测试的一整套全流程的操作方法。
核心原则:独立供电,不可仅依赖USB供电
同时让32路舵机开展工作的时候,电流需求能够达到10A以上,而USB接口,其最大为500mA,是完全没有办法承受的。以下是清晰明确的电源要求:
接线方法:
将电源正极连接到控制板的VIN端子(或VCC)
将电源负极连接到GND端子
要去确认一下,电源电压它是不会超过控制板标称最大值的,这个最大值呢,通常情况下是在5到12V之间,具体的数值是以具体型号说明书作为标准来确定的。
一般出现的错误情形是,直接利用电脑的USB去给控制板供应电力从而驱动多个舵机,最终致使电脑的USB接口被烧毁,或者是控制板出现重新启动的状况。而正确的实施办法是,USB仅仅是用来进行信号传输的,舵机的动力电要单独进行接入。
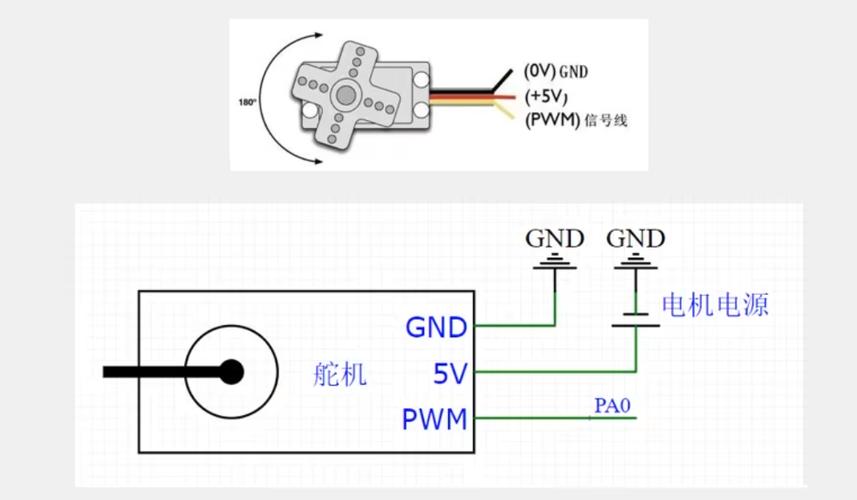
一般而言,每一个舵机接口常见是3Pin 排针,其间距为2.54mm,具体定义情况如下:
信号:输出PWM信号,该信号用于连接舵机信号线,其信号线通常为黄/白/橙色。
V+(正极):舵机电源正极,连接舵机红色线
GND(负极):公共地,连接舵机棕色/黑色线
1. 先将控制板断电
2. 先要把舵机线插入那对应通道的排针,得留意方向,其中SVGND的顺序必然要匹配。
3. 确认所有舵机的地线(GND)与控制板的地线共地
当连接的舵机数量超过16个时,要建议用到舵机延长板或者分线板,防止因线束混乱致使接触不良。与此同时,用扎带对线束进行固定,并且存档每个舵机所对应的通道号。
ADU驱动安装步骤(以FT232芯片为例):
1. 下载对应操作系统版本的驱动(FTDI官网或控制板配套光盘)
2. 关闭杀毒软件后运行安装程序
3. 用USB线连接控制板与电脑
4. 将设备管理器予以打开,从而确证识别到COM端口,此为系统下情况,或者/dev/,这是Linux系统中的情况。
微软的系统,在设备管理器那里,出现了标识为“USB Port (COMx)”的情况。
苹果操作系统:在终端之中输入列出设备目录下以/dev/tty.开头的所有文件或目录 ,有星号作为通配符。
针对Linux系统,于终端处进行输入操作,输入的内容为,dmesg,管道符号,grep,。
若无识别,尝试更换USB线或重新安装驱动。
建议选用 来搭配控制板依照自定义协议进行操作,或者采用 (但仅限于 芯片方案)。
# 基于的32路舵机控制板标准示例
from
time
# 初始化控制板,频率50Hz(标准舵机)
kit = (=32, =0x40, =50)
# 设置第0号舵机为90度(中位)
kit.servo[0].angle = 90
time.sleep(1)
# 设置第0号舵机为0度
kit.servo[0].angle = 0
time.sleep(1)
# 设置第0号舵机为180度
kit.servo[0].angle = 180
# 批量设置第18号舵机
for i in range(1, 9):
kit.servo[i].angle = 90
time
ser = .('COM3', 9600, =1) # 修改为实际COM口
time.sleep(2)
def (, angle):
# 通道号:031, 角度:0180
cmd = f'#{}P{angle:.0f}T1000\r\n' # T1000为运行时间
ser.write(cmd.())
# 示例:设置0号舵机到90度
(0, 90)
脉冲宽度调制频率:对于标准舵机而言,其频率是50赫兹,也就是相应周期为20毫秒,而数字舵机在此基础上能够支持更高的频率。
脉宽的范围是,从0.5毫秒(处于0度的状态)开始,一直到2.5毫秒(处于180度的状态),其中点位置是1.5毫秒(处于90度的状态)。
分辨率:多数控制板支持1μs步进,角度精度约0.09度
检查电源:电压是否足够,电流是否满足所有舵机同时工作
检查信号线:S线是否接触良好
检查共地:所有舵机地线与控制板共地
电源电压过高或过低(标准舵机通常为4.86V)
负载过大,需要更换大扭矩舵机或减小机械负载
PWM频率错误,非标准频率可能导致舵机异常发热
更换USB数据线(部分线材仅供电无数据)
重新安装驱动程序
瞧一瞧控制板是不是进入了DFU模式,要是不小心触发了错误,拿东西短接复位的口子之后再重新给它通电。
检查该通道舵机是否损坏(换到已知正常通道测试)
核查控制板伟创动力,此通道的MOS管,或者驱动芯片,有没有被烧毁,通过观察,看有没有异味,或者焦痕。
软件配置是否正确(通道编号从0开始还是从1开始)
1. 降低舵机同时启动电流:在代码中加入延时,让舵机逐个启动
2. 增添大电容来实现稳压,于电源输入端来并联超过1000μF的电解电容,以此抑制电压出现波动。
3. 加装散热:大负载应用时,在驱动芯片上加装散热片或风扇
4. 采用光耦隔离,于强干扰环境,像电机驱动附近这种地方,要在PWM信号端增添光耦隔离模块。
32路舵机控制板使用的三个核心保障:
供电独立且充足:大电流稳压电源是稳定运行的基础
接线规范共地:所有舵机地线与控制板地线可靠连接
参数进行匹配,PWM频率为50Hz,脉宽的范围是0.5至2.5ms,这堪称是标准舵机的黄金参数。
立即按以下顺序操作:
1. 断开所有连接,查阅控制板说明书确认供电电压范围
2. 仅连接1个舵机,用示例代码测试单通道运行
3. 逐步增加舵机数量,每增加8个重新测试稳定性
4. 做好通道映射记录,便于调试维护
基于本文所列出的步骤去进行操作,你能够于30分钟之内达成首个多舵机项目的构造搭建以及后续运行作业。要是在此期间遭遇到未被覆盖涵盖的问题情况,那就请去详细查阅查看一下该控制板所附带附赠的官方文档或者是技术规格书籍。























