



























TECHNICAL SUPPORT

发布时间: 2026-05-23
当有多个舵机一同投入到工作当中时,常常会出现各式各样的异常情形。比如说,它们会毫无章法地胡乱转动,或者产生较为明显的抖动现象,甚至有时候会全然不受控制。可是,需要清楚地知道,如果是这样的情况,通常并非是舵机自身出现了损坏问题,而是因为供电不足以及受到信号干扰才致使造成的。
此文会径直给你展现从根本之处解决问题的强硬方案,帮你一回成功解决多个舵机协同工作的难题,使各个舵机得以稳定、有序地运转,防止出现上述那些让人烦恼的异常状况。
最常见的问题:供电不足导致“假干扰”
好多新手于操作期间,把多个舵机径直并联在同一个5V USB口之上,紧接着,当舵机开始运作时,电压就会快速被拉低,进而致使芯片复位,舵机也跟着出现胡乱动的状况。
核心:
每一个舵机,都需要单独去进行供电,再不济,就选择采用大功率稳压模块(5V/10A以上)来供电,要特别注意,千万别将开发板上的5V输出共同使用。
舵机电源线(红色正极、棕色负极)尽量粗、短,避免线阻过大。
倘若采用锂电池组,那就一定要保证电池的放电能力大于或等于所有舵机峰值电流的总和,举例来说,要是存在5个9g舵机的情况,那么它们的峰值电流之总计大约是5A。
信号线干扰:地线共地
属于多个舵机的信号线,其颜色一般是白色或者橙色,会径直连接到同一PWM引脚。要是众舵机的地线,也就是负极,未连接到一块伟创动力舵机,那便会产生电位差,进而致使信号出现乱跳的状况。
正确接法:
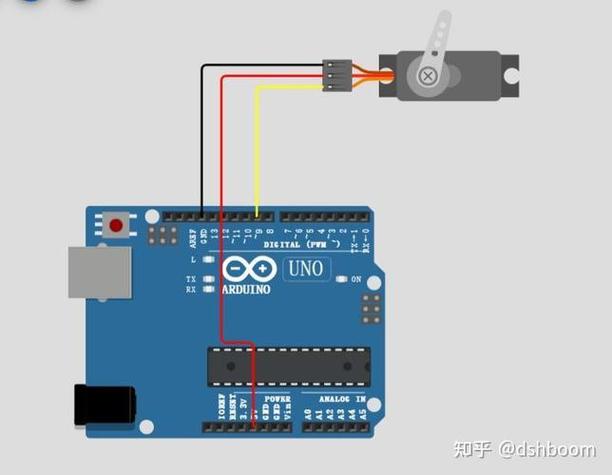
取每一个舵机的负极,即棕色或者黑色的线,用粗导线与主控板的GND端焊接,将它们连到同一个点,这样可达成最佳的星形接地效果。
信号线的长度,要尽可能保持一致,要是有需要进行延长的情况,那就使用屏蔽线或者双绞线,其外层要接地。
PWM频率冲突:避免CPU占用过高
要是借助的Servo库去对多个舵机做控制,那库函数会占用定时器中断,一旦这个中断被别的操作给阻塞,舵机就会出现抖动的状况。
替代方案:
采用舵机驱动板伟创动力,该驱动板通过I2C通信方式,它能单独对多达16路舵机予以精确控制,于整个控制进程里,绝对不会占用主控CPU的资源,进而保证系统的高效稳定运转。
或者选择ESP32的LEDC库,这个库能支持独立硬件PWM通道,这样的话,多个舵机运行时就能够彼此不产生干扰。
机械反馈干扰:避免物理互扭
一旦实际运行的存有或者机械臂的机器人里,当多个舵机开展联动操作之际,要是连杆机构所处的设计有着不合理的地方,那么这些舵机之间就会在彼此之间施加作用力,进而导致舵机出现堵转的状况,也会引发过热以及抖动现象。
解决方法:
在结构上增加缓冲件或弹簧,避免刚性硬连接。
对每个舵机的转动范围予以检查,瞅一瞅是不是存在被机械限位给卡住的情形。要是出现了这种状况,在有必要的时候于代码当中设置最大角度限制。
实战案例:6足机器人抖动排查
存在一位用户开始动手制作六足机器人,挑选了18个舵机用以构建机器人的腿部驱动系统。待其完成组装之后并且接通电源,令人始料未及的状况发生了,只见所有的腿都杂乱无章地毫无规律地抖动了起来。
排查步骤:
1. 进行单独供电测试,采用的是12V/20A电源,通过3个5V/10A降压模块来开展分区供电操作,在这一过程当中,抖动现象大幅度减少。
2. 先进行共地检查,小心翼翼,仔细地把每一个舵机的负极,逐个焊接到铜排上,之后,将铜排连接到电源的GND处,到这时,舵机抖动的现象,彻底消失了。
3. 把信号隔离,针对每一路PWM信号线,采取串联100Ω电阻此方式,以此进一步对杂波进行有效滤除。
最终机器人运行平稳,负载测试通过。
行动建议
如若下次再度碰到多舵机干扰这般状况之际,需按照“供电→共地→驱动板→机械结构”此等顺序,逐个予以排查。
优先将电源进行升级,与此同时增添驱动板,采用这样的方式才是最为节省时间并且最为具备效果的标准解决途径。
记住:90%的干扰问题,本质都是“电”没给到位。























