专为仿生灵巧手关节设计的精密微型舵机,通过多个集成可实现仿生全自由度运动,支持独立控制,安装简单且便于后期维护,满足机器人有限的空间结构中实现运动需求。
轻量化设计
机加金属齿轮
高效散热
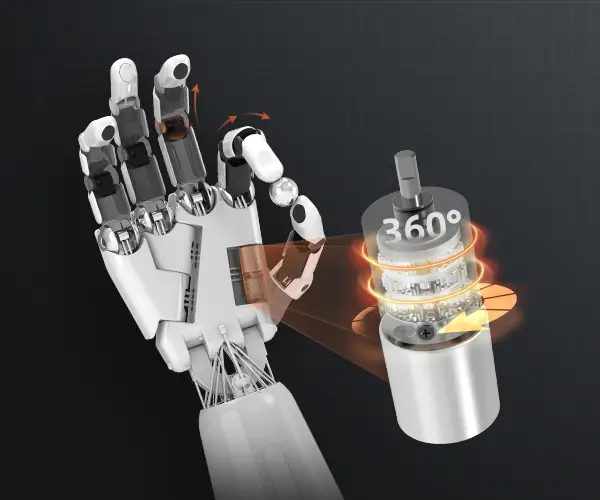
专为仿生灵巧手关节设计的微型行星减速电机,集无刷空心杯电机、金属行星减速和编码器于一体,具备高功率密度、高动态响应、低温升等特性。
工作特性
无刷空心杯电机
应用于人体外骨骼的无框电机,采用高度集成的轻量化设计,动力强劲,内置高精度闭环驱控和双磁性编码器,支持过载保护、防水防尘。
堵转扭矩
空载转速
传感反馈
兼具直接驱动和减速驱动优势的准直驱机器人关节电机,采用低减速比设计,减少机械损耗的同时提升系统效率,兼顾高扭矩、低惯量和高动态性能,是精密运动控制和人机交互应用的理想选择。
通信协议
编码器
专为机器人移动平台设计的无刷轮毂电机,通过优化绕阻和磁场优化设计,满足低速大扭矩的场景需求。
位置、速度、电流
联系伟创动力产品专家,为你的产品推荐合适的驱动系统所需部件。