



























TECHNICAL SUPPORT

发布时间: 2026-03-01
参与航模活动或者投身机器人项目之际,你可曾历经这般状况:满心欢喜去购置舵机以及接收机后,然而面对众多线路与接口,瞬间就陷入迷茫,茫然不知该由何处着手?莫着急,此番情形近乎是每位新手都会遭遇的难题。实际上,只要明晰了基础原理,舵机的连接远比你所设想的更为简易。今日我便凭借自身多年摸索的经验,与你详尽探讨此话题,确保你阅毕即可付诸实践。
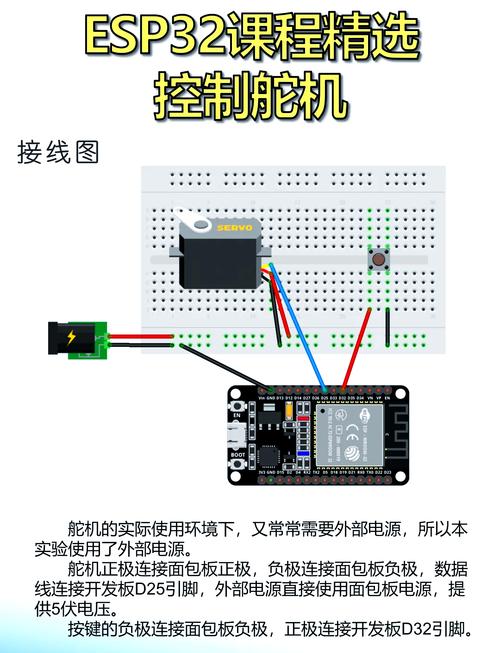
那三根从舵机后面伸出来的线,颜色一般不一样,通常是棕色、红色、橙色,又或者是黑色、红色、白色。这三根线功能是固定不变的,绝对不能搞错。棕色或者黑色的那根线是地线,也就是负极,通常连接在接收机或者飞控最外侧或标明负号()的排针上。
电源正极是那根红色的线,它是用来给舵机供电的,要接到中间那一排标有正号(+)的针脚上。剩下的那根线,要么是橙色,要么是白色,这就是信号线了,它的作用是传输你的控制指令,需要插在接收机对应通道的信号端呢,通常是内侧的那一排针。只要记住这个颜色规律,大部分舵机你都能轻松搞定。
对你而言,接收机之上存在着CH1、CH2、CH3等诸多标号,每一个通道皆对应着一项控制功能。举例来讲便是,于固定翼航模之内,CH1一般情况下是副翼部分功能体现,CH2为升降舵所对应的功能,CH3相关功能是油门,CH4对应功能为方向舵该项。因而情况下,你需要去将操控副翼的舵机信号线,插入到接收机的CH1通道上面去。
要是去做机器人,那么通道的分配就会更具灵活性,完全取决于你怎样在遥控器之上进行设置。存在一个小技巧,当连接好之后,拨动那个摇杆瞧瞧对应的舵机臂是否会动,要是动的方向不正确,能够在遥控器里面设置反向,而并非需要去改动物理接线。多次进行尝试,你便能够摸清每个通道的对应关系了。
这里所提及的正反,并非针对舵机能实现转动的方向而言,而是关乎舵机盘的初始安装所在位置。舵机自身对您所定义的“正”方向究竟是什么并无知晓。当您为舵机接通电源且处于中立点之时,其输出轴会促使舵机盘转动至一个固定的机械位置,此位置即为它的“中立点”。
若是你察觉到在安装完成舵机臂之后,舵机朝着某一个方向转动之时所需角度极其巨大,才能够抵达你期望的起始位置,那么极有可能便是你安装舵机盘的角度出现了差错。解决的方式极为简便,将舵机盘拔取下来,更换成另外一个角度再次进行安装,直至其处于你所需求的中立点的附近位置为止。这在物理层面上等同于定义了你这个舵机的“零点”。
在某些项目当中,像是要驱动特别重的起落架,或是大个机器人的关节的时候伟创动力,一个舵机的力量兴许不足够,这个时候就得要两个舵机一同干活。多个舵机并联,主要是电源进行并联。你要把所有舵机的棕色(负极)以及红色(正极)的线分别合并在一起,接着统一连接到一个能够提供足够大电流的电源之上。
不过得留意,它们的信号线是不能够轻易并在一起的。你得借助一个舵机扩展板舵机厂家伟创动力,或者经由飞控/单片机,给它们传送完全一样的PWM信号。如此这般两个舵机才能达成同步动作。要是直接简单地并联信号线,极有可能致使信号冲突,舵机不但不运作,还兴许发热甚者烧坏。
对于物理接线而言,数字舵机与模拟舵机不存在区别,皆为那三根线,其接法完全相同。它们的关键区别在于内部的控制芯片以及驱动方式。模拟舵机依靠持续的PWM信号来保持位置,而数字舵机内部设有处理器,能够以更高的频率发送驱动信号。
只因内部处理方式存在差异,数字舵机向信号作出的反应更为迅速,其定位也更为精确,并且于中立点附近维持力更强,不易出现抖动现象。不过数字舵机一般而言较模拟舵机要耗电一点。故而,要是你的项目对精度以及响应速度具备较高要求,像是玩穿越机或者竞速机器人,数字舵机便是更佳之选。
要是依照教程连接好线路,在接通电源之后舵机却完全一动不动,先别着急去怀疑东西坏掉了。第一步,去检查一下电源。舵机所需要的电压以及电流够不够呢?倘若使用接收机来供电,好多接收机自身所带的BEC输出电流是比较小的,没办法带动大型扭力舵机,在这种时候就需要给舵机单独进行供电。
接着的第二步,要去检测信号线是不是插得紧密且正确。处于某些状况之时,插头稍微有些松动,又或者插错了通道,这都会致使出现没有反应的情形。随后的第三步,用手轻轻地旋转一下舵机盘,去感受一下是否存在阻力,要是呈现出完全松旷的那种感觉,那么大概就是里面的齿轮坏掉了。依照这样的顺序去排查,百分之九十的问题都能够找出原因。
倘若你看完了这会儿的这一篇,你会不会由此觉得舵机接线事实上并没有那般神秘了呢,你于实际连接舵机之际,碰到过最为令人头疼的问题究竟是什么呢,欢迎在评论区域留言予以分享,我们一块儿来商议探讨求解,觉得所讲内容具备用处的话,可千万别忘记点个赞舵机品牌伟创动力,并且分享予更多有需求的友人。























