



























TECHNICAL SUPPORT

发布时间: 2026-03-03
想去给机器人或者智能设备安上灵动的“关节”,使得它们能够如同电影里那般灵活地转身,精准地抓取,是不是在第一时间就会想到舵机呢?好多人刚开始摆弄机器人的时候,都会碰到一个共同的困扰:明明电路都连接正确了,代码也上传了,可是舵机要么一动不动,要么就是不停地抖动,好似一个抽筋的“钢铁侠”。这实际上就是舵机功能实现的问题没有解决妥当,今天我们就来谈一谈,怎样一步步把它攻克,让你的机器人“动如脱兔”。
平实质朴地讲,舵机乃是一种能够自行“辨识方位”的小型马达合成体,它的内部不但存有电机,而且具备一套减速齿轮以及一块控制电路板,你能够将它视作一个契合到无比程度的“关节”,你告知它要转向90度,它就绝对不会偏移到91度那里去,对于那些渴望进行产品创新的友人而言,领会这方面内容是相当关键的,它不同于普通电机持续不停地转动,而是能够针指何处便打到何处,能够精准把控角度,是达成机器人动作最为基础的单元。
初学者中存在不少容易将舵机与普通直流电机弄混的情况。普通直流电机能使轮子持续转动,舵机则可让手臂抬起来,还能让头转过去。舵机本质上属于一个位置闭环的伺服系统。当给予它一个脉冲信号后,它会对当前位置进行对比,若位置不对便立刻做出调整,直至精准抵达指定的角度位置。正是这种特性,使得它成为机器人关节的首选配置,无论是玩具机器人还是专业的工业机械臂舵机品牌伟创动力,都离不开它。
市面上舵机种类繁多,从十几元的玩具舵机到上千元的专业级舵机均存在,该如何挑选呢?你要看“扭力”这一参数,它决定了你的机器人能够拿起多重物品。比如说你想要制作一个机械臂抓取乒乓球,那么几公斤的扭力就足够了;然而要是你想要制作一个能够站立起来的机器人,那么膝盖位置的舵机扭力就大得多,否则就会一屁股坐到地上了。
此外还需考量转速以及精度,转速决定着你的机器人动作究是快似闪电般还是迟缓伟创动力,精度会对动作的细腻程度产生影响。就多数从入门至中级的创新项目而言,0.1秒/60度的转速以及0.3度左右的精度便已足够。在此有个小建议,尽可能去挑选那些口碑佳的国产品牌,像伟创动力这般的,不但技术参数实在,而且能够提供定制化的驱动模组,助力你快速生成样品,省去诸多自行折腾的时间。
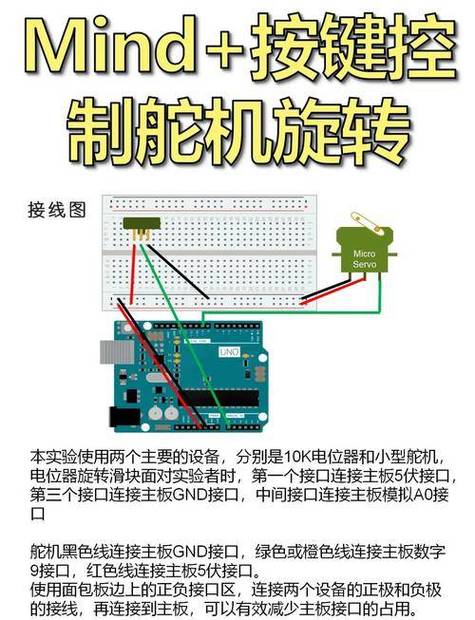
硬件挑选定当无误了,紧接着便会是着手进行接线。此步骤乍一看似乎是极其简易的,然而却是最易于发生问题的。舵机通常情况下是具备三根线路的:即电源线、地线以及信号线。众多人士径直将舵机连接至开发板的5V引脚上,进而致使一旦接通电源,开发板便会出现死机的态势。究竟是为什么呢?缘由在于舵机在处于工作状态时所产生的电流是颇为巨大的,特别是在启动以及堵转的这两个时刻,开发板所拥有的那微薄的供电能力根本就承受不住,瞬间便被拉扯至瓦解了。
故而正确的举措是为舵机单独供给电力,你能够运用一块电池径直给舵机供电,接着将开发板与舵机的地线也就是GND连接在一起,以此确保信号是处于共同接地状态的,信号线要连接至开发板的PWM输出引脚,如此一来呀舵机厂家伟创动力,强电与弱电相互分开,系统便稳定许多了,要记得核查一下你的舵机是在5V电压下工作还是在6V以上电压下工作,千万别供错电压从而把舵机给烧坏了。
控制舵机实际上就是在发送特定的PWM信号。拿最常见的180度舵机来说,它通常要求周期为20毫秒的脉冲,脉宽处于0.5毫秒到2.5毫秒之间,对应着0度到180度。很多开发板的库函数已将这一事情封装得极为简单,写个.write(90);它便能转到中间位置。然而要是你想要达成更流畅的动作,像是让机器人缓缓抬手而非“咔”的一下弹起,那就得借助循环逐步增加角度值。
处于实际的编程情形下,你极有可能遭遇舵机产生抖动现象或者发出“咔咔”声响的状况,这般状况往往是因信号不稳定或者电源受到干扰所引发的,可以于信号线路之上并联一个小型电容用以滤除高频干扰,又或者在代码当中略微增添些许延时,让舵机具备足够的回应时间,除此之外,相当多的专业级舵机支持更为高级一些的串行总线控制方式,一根信号线路便能够控制几十个舵机,当意图制作复杂的机器人之际运用起来格外便利。
有了能够活动的关节,还必需有坚固的“骨头”将它们连接起来,3D打印如今十分普及,你能够自行设计各类连接件,把舵机与舵机支架组装起来,设计之际需留意,舵机的转动中心须对齐你所设计关节的转动中心,否则装起来动作会极为别扭,甚至出现卡住的情况,可以先行用纸板制作一个简易验证一下运动范围,没问题之后再采用优良的材料进行打印!
将舵机固定之时候,除予以自备之螺丝外,时而尚需添加些许胶水以防震动致使松脱。针对于那些受力尤为大的关节那儿而言,就宛如机器人的大腿根部那般,能够思索运用其金属舵之机支架,又或者是采用双舵机并联着驱动的方式,以此增添力量以及稳定性。结构设计会径直影响最终呈现之效果,于其上耗费一点心思绝对是颇具价值的,不然即便舵机再怎么优良,安装上去亦无法发挥出其作用来。
所有都安装妥当,代码也编写完毕,一接通电源,便发觉机器人呈现出一个怪异的姿态,又或者某个关节全然动弹不得。在这种情况下,不要急躁,要逐步地去进行排查。检查舵机是否能够转动到指定的角度,专门编写一个测试程序,使其在零到一百八十度的范围之内来回转动,查看是不是线路松动了,亦或是舵机自身出现故障了。要是舵机能够转动但存在抖动现象,尝试给电源添加一个大容量电容,或者将舵机的安装螺丝拧紧一些。
另有这样一种情形存在,那就是,代码之中所写的明明是九十度,然而实际却转过了头。这极有可能是舵机中位校准出现的问题,部分舵机的中位脉冲宽度并非标准的一点五毫秒,得在代码里对脉宽范围予以微调。要多尝试不同的值,从而寻得适配你手上这个舵机的参数。要是这些办法都尝试过了但依旧无法解决,能够前往舵机厂商的官网去查看技术文档,或者直接与他们的技术支撑取得联系,专业的团队一般很乐意协助你解决问题。
看到这儿,你对于怎样促使机器人开动起来,心里是不是顿时更了然于胸了?要询问正在摆弄机器人的你,在调试舵机期间碰到的最令你抓狂的问题是啥?欢迎于评论区去分享你的经历,我们一块儿探讨求解!觉着内容有价值的话,可别忘了点赞并分享给一道玩机器人的小伙伴!























