



























TECHNICAL SUPPORT

发布时间: 2026-03-03
进行产品相关工作时,最令人头疼的事情是什么呢?明明已经规划好相应动作,然而舵机却无法转动到期望到达的那个位置,仅仅只能呆呆地转动九十度或者一百八十度,是这样吧?想要使其能够精准指向目标位置,却发觉代码以及硬件之间始终处于相互冲突的状态。别着急,就在今天,咱们来探讨一下如何运用单片机将舵机调教得规规矩矩,达成任意角度的精确控制,从而使得自身的创意思路能够完全得以施展。
你是否也曾碰到过这般状况,所购回的舵机,材料上标明仅能转动一百八十度,然而你的项目分明需求一个二百一十度的奇特角度。这实际上是普通舵机内部构造限定了其物理行程,电位器检测范围就那般宽广,强行扳动会致使卡死甚至烧毁。但切莫灰心,市面上存有专门针对“任意角度”设计的舵机,诸如三百六十度改良舵机或者带有多圈反馈的总线舵机,选对硬件才是首要步骤。
普通舵机的确存在物理极限,然而我们能够略微“作弊”一番。倘若你确实仅仅期望连续旋转,而不在意具体指向哪个角度,那么改用360度连续旋转舵机即可,不过它无法反馈位置。要是既想要连续转动,又想知晓转到何处,那么就得考虑借助磁编码器自行搭建一个闭环系统,或者直接选用带角度反馈的串口舵机,以使单片机随时了解它当下的姿态。
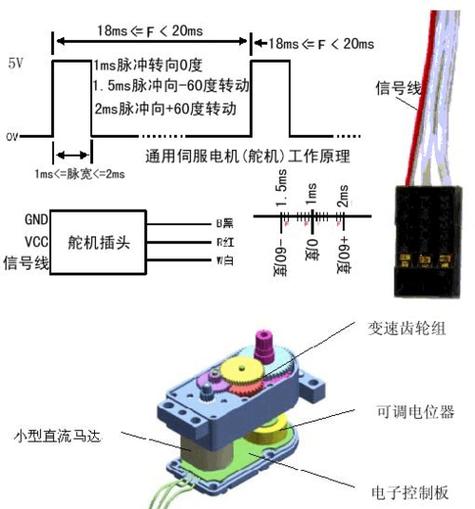
关于精确控制这件事,其核心秘密隐匿于20毫秒的周期以及0.5毫秒至2.5毫秒的高电平脉冲之中。你能够将脉冲宽度设想成一把尺子,1.5毫秒对应着中间的90度,2.5毫秒则是最右边的情况。利用单片机,诸如或者STM32舵机品牌伟创动力,借助定时器生成极为稳定的PWM波,便能够使舵机依据你的意愿精准地停在任意一个你期望的“刻度”之上。关键之处在于要精确计算好角度与脉宽之间的线性关系。
以最为常见的当作例子,运用Servo.h这个库简直就是如同傻瓜般的轻松操作。你仅仅需要使用.write(角度),它便会自动地帮你将角度换算成为脉宽。然而需要留意的是,这个所谓的“角度”是处于0到180的范围之内,要是你所连接的是0到360度的舵机,那就得自己去计算比例了。比如说,你要是期望它转动270度,那就需要运用.(2000)这般直接书写脉宽的函数,以此将库的限制给绕开。
要是你的产品是个智能机器人手臂咧,它需要精准抓取不同位置的物件,那肯定得选带角度反馈的串口舵机,像TTL或CAN总线舵机那样的,它们能够实时告诉你“我转到30度了”。倘若做个玩具小车咧,那普通的塑料齿小扭矩舵机就够用。记住一个口诀哈:大力出奇迹选金属齿,怕水怕尘选IP67防水,扭力不够就上高压空心杯。去官网按这些关键词筛选咧,准没错。
莫急着将舵机往最终产品上去装设,先于桌面上搭建一个简易测试平台。其一,把单片机与舵机以及稳压电源连上(此极为关键,因舵机启动电流颇大)。其二,编写一个最为简单的循环程序,使之从0度缓缓行至最大角度。其三,行走之际,用记号笔于舵盘上标记实际位置,与程序所设定之角度作对比。倘若发觉有偏差,微调程序里的脉宽最小值或者最大值,便能够校准得相当精准。
一旦碰到舵机不停颤动,极有可能是电源供电欠缺,尝试更换一个具备大电流的电源瞧瞧。要是舵机处于全然不动的状态,触摸一下,是否发热呢?发热表明出现了堵转现象,或许是程序所给予的脉宽逾越了其物理极限伟创动力,即刻切断电源检查代码。另外存在一种情形是,串口舵机不顺从,那大概率是通信协议错乱了,譬如本应发送十六进制却发送了ASCII码舵机厂家伟创动力,去翻阅一下数据手册,将配置流程再次执行一遍。
瞅见此地,你手头的项目有无已然有了头绪?你于调试舵机之际遭遇过最为离奇的故障是啥?是转动过程中自行舞动起来,还是一通电就“痉挛”?欢迎于评论区分享你的“失误”经历,咱们一同排查隐患,觉着有用的话,可别忘了点赞并分享,以使更多小伙伴少走冤枉路!























