



























TECHNICAL SUPPORT

发布时间: 2026-04-06
你有没有思考过借助一个微型的电机去模拟门锁的开启与关闭动作,比如说制作一个智能快递柜的用于扣合的部件或许可以,又或者是给小屋增添一扇能够通过遥控来控制的门锁可试试。采用舵机去模拟门锁,这是一种具备简单特性、可靠性能而且成本极其低的方案。本文给出从原理方面、硬件选型方面一直到代码实现方面的完整思路,以此来助力你迅速搭建起一个功能稳定的舵机模拟门锁系统。
舵机那输出轴能够精准地旋转至指定角度,这指定角度一般涵盖0°到180°或者0°到270°。模拟门锁内在的本质,其实就是借助舵机臂的摆动,去推动或拉动锁舌、插销或者挂钩,借此达成“锁止”以及“释放”这两个状态。
常见机械转换方式:
,舵机旋转,此时,在舵机臂末端固定着一个刚性连杆,而这个刚性连杆的另一端连接着锁舌,进而,随着舵机的旋转,该连杆会带动锁舌做直线运动,以此实现直接推动。
将偏心轮用于驱动,在舵机臂那儿安装一个偏心圆盘,当圆盘转动起来的时候,它会对锁舌弹簧机构施以挤压,以此达成伸缩。
那根拉线,作为钢丝,是舵机臂要去拉动的软钢丝,该钢丝会将远处的锁扣带动起来,这种情况是适合安装空间受到限制相关场景使用的。
事例呈现:有一位热衷于自己动手做东西的人,在着手制作简易的快递存放柜子时,选用了9g的舵机,借由它直接去推动塑料制成的插销。当舵机转动到0°这个角度的时候,插销就会向外伸出,进而锁住柜子的门;而当舵机转到90°这个角度时伟创动力,插销就会往回收缩,此时柜子的门就能够被打开。整个操作的过程当中不存在卡顿的现象,所耗费的成本也仅仅只是10元钱左右。
选型不当是模拟门锁失败的主要原因。请按以下参数选择:
参数 推荐值 说明 |
||||
扭矩 ≥1.5kg·cm(小锁)
大于或等于三千克厘米(木门/金属锁舌),扭矩要是不足,就会致使锁舌推不动或者卡死,塑料模拟锁舌用一点五千克厘米就行。
工作角度方面,存在180°或者270°这种状况,90°的舵机行程太短,所以不被推荐,而180°能够满足绝大多数的直线行程。
提到供电电压,存在两种情况,一种是5V且这属于常见情况, 也有6V到7.4V的情况,此供电电压需与舵机规格相匹配。其中对于5V的供电方式,它能够由USB或者开发板来直接供电,特别指出适用于小舵机。而大舵机则需要独立的电源来供电。
可以选择的舵机类型有,模拟舵机,也就是那种价格较为便宜的,或者是数字舵机,也就是那种精度更高更准确的,模拟舵机其实就足够用了,数字舵机的主要优势就是位置保持力相对来说要有更强但是成本价位也更高。
重要之处在于伟创动力舵机,那被称作锁舌的部件,其实际所需要的呈直线状的行程,一般情况下仅仅只有五毫米至十五毫米。当舵机臂的半径为十五毫米的时候,它摆动九十度便能够产生大约二十一毫米的弧长,经过连杆进行转换之后,所呈现出来的直线行程大约是十毫米至十五毫米的范围,这实际上是完全能够满足需求的。
供电安全给出提示,要是使用9g到20g的小舵机,那么能够直接由或者ESP32的5V引脚来供电,不过不要同时驱动多个。要是使用SG90等常见的舵机,其峰值电流能够达到500mA,建议使用外部5V/1A电源模块,防止烧毁开发板。
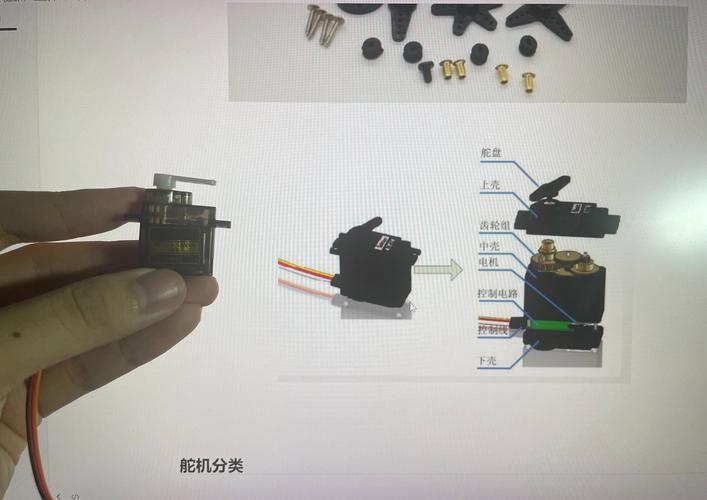
舵机一般有三根线:
棕色/黑色:GND(地)
红色:VCC(电源,5V)
橙色/黄色:PWM信号线
连接方式:
1. 舵机GND → 控制板GND
2. 舵机的VCC,连接到外部5V电源的正极,或者若为小舵机则是控制板的5V输出。
3. 舵机信号线 → 控制板任意PWM引脚(如D9)
要留意,电源负极也就是GND,它必得要跟控制板的GND处于共地状态,不然,信号就没办法被识别了。
定义两个固定角度:
锁止角度:例如0°(锁舌完全伸出)
释放角度:例如90°(锁舌完全缩回)
每当进行操作之际,舵机径直转向相应的角度,这般方式简易且可靠,适宜于绝大多数的场景。
舵机于锁止角度处作停留,当接收到开锁信号之时,迅速转向释放角度且停留零点五秒,随后即刻转回锁止角度,这般方式契合那种需求“自动复位”的电磁锁效果。
代码核心逻辑(示例,仅作逻辑说明):
#
Servo ;
int = 0; // 锁止角度
int = 90; // 释放角度
void setup() {
.(9);
.write(); // 初始为锁止状态
}
void () {
.write();
delay(500); // 保持释放状态0.5秒
.write(); // 自动复位
}
void loop() {
// 收到开锁信号时调用 ()
}
问题1:舵机转动到位后,锁舌仍可被外力推开
原因:舵机在目标角度下保持扭矩有限,外力可克服。
搞定:于机械结构里增添死点(像连杆经过中心位置那般),或者运用带有自锁功能的蜗轮蜗杆减速舵机。
问题2:舵机发热严重,甚至烧毁

原因:锁舌机械阻力过大,舵机长期处于堵转状态。
进行处理:降低锁舌的摩擦力(采用润滑方式),或者挑选更大扭矩的舵机。一定要设置舵机转动超时保护(比如说:在1秒之内要是没有抵达目标角度,那就停止进行驱动)。
问题3:角度不准,锁舌伸不到位
原因:舵机实际角度与代码设定有偏差,或连杆间隙过大。
为解决该问题,要调用.write(angle) ,之后运用.read() 读取当下角度进行确认,接下来在机械方面增添限位开关用作位置反馈。
1. 第一步:面包板验证
使用一块控制板,借助一个舵机,通过一根杜邦线,去编写最为简单的那种从0°向90°再到0°循环的程序,进而观察舵机臂摆动是不是流畅,此步骤能够排除硬件故障。
2. 第二步:模拟负载测试
选用硬纸板制作出假象的锁舌,采用橡皮筋去模拟弹簧所产生的阻力。对舵机角度予以调整,直至锁舌能够完整地推出以及拉回。将实际所需的两个角度数值记录下来。
3. 第三步:集成到真实门体
,手动去推动锁舌从而感受其中的阻力,要保证的是舵机能轻松地将其克服。之后,进行正式的安装,安装完毕后,反复去测试100次以上,接着统计失败的概率。要是成功率低于99%,那就需要去检查机械干涉或者对舵机进行升级。
再度重申核心观点:舵机模拟门锁的实质,是精确地把旋转角度映射成锁舌的直线位移。成功的重点并非舵机价格高低,而是机械转换结构不存在卡滞现象,供电保持稳定,角度边界预留一定余量(例如将锁止角度设定为5°,而非0°,借此防止舵机在极限位置出现磨损)。
舵机保持的扭矩存在着局限性,没办法去触及安全门锁防撬标准所要求的程度,使其不能够被运用在真实的防盗门锁上。本文所提及的方案仅仅是适用于像是、展示柜、储物盒、智能快递箱这类有着低安全要求状况的场景。
碰到断电状况该如何处理呢:舵机一旦断电,就丧失了位置保持的能力,在此情形下,建议采用并联机械锁芯的方式,或者选用具备断电自锁功能的电磁铁。
提供应急开启机制,一定要预留手动开锁方式,像拉线或者隐藏拨杆这类的,目的是防止舵机出现故障,以及防止电路出现状况。
行动建议如下:马上使用一个价格大约为五元左右的9g舵机,以及一块开发板,花费三十分钟的时间将上述代码运行成功连通。你将会十分惊奇地发觉,一个具备可靠性的模拟门锁核心控制单元仅仅需要少量的那些几行代码以及简便的连杆。请记住这一点:要对机械行程展开测试,之后再去编写代码角度;运用低压小舵机进行验证操作,随后再去升级大扭矩方案。依照本文所阐述的思路,你绝对能够在一个下午的时间之内,达成从无到有且可用这样子的舵机模拟门锁原型。























