



























TECHNICAL SUPPORT

发布时间: 2026-04-07
舵机转动的角度不是固定不变的值,常见的标准角度范围存在两种情况,一种是从0度到180度,另一种是从0度到360度,具体的角度范围是由舵机的类型以及其内部结构来决定的。对于普通的舵机,就像航模、车模所使用的那种,最为典型的工作范围是90度、120度或者180度;然而工业级的或者经过特殊设计的舵机却能够实现270度、360度的连续旋转或者多圈的旋转。下面按舵机分类详细说明各自的角度范围、控制逻辑和适用场景。
根据市场主流产品规格伟创动力舵机,舵机角度范围可分为以下四类:
典型应用:小型机械臂关节、简单摆动机构
存在一种信号,它被称作控制信号,此控制信号呈现为PWM脉宽形式,其脉宽范围处于500μs至1500μs之间,其中中心点对应的脉宽数值为1000μs。
特点:行程短,精度高,适合小角度往复运动
典型应用:车转向、小型机器人腿关节
用于实施控制的信号是,PWM脉宽处于500微秒至1900微秒的范围之内,其中中心点为1200微秒。
特点:平衡了角度范围和精度,是最常见的基础类型之一
典型应用:航模舵面控制、机器人关节、云台
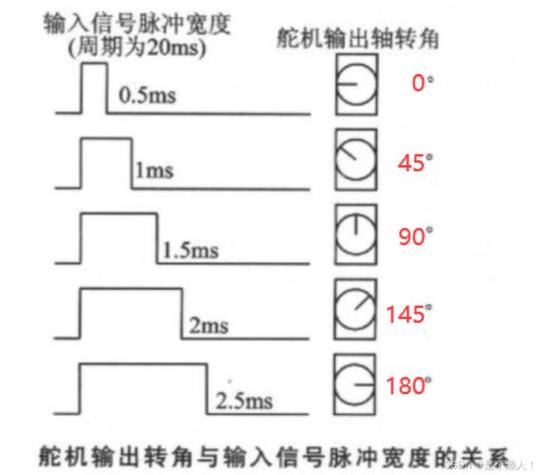
控制信号,为称作PWM脉宽的信号,其范围是500微秒至2500微秒,其中中心点1500微秒对应着90度。
特点:绝大多数标准舵机采用此范围,兼容性好,价格适中
典型应用:特殊工业设备、机械臂大范围摆动
控制信号,其中PWM脉宽处于500微秒至3500微秒的范围,中心点2000微秒对应着135度。
特点:角度范围更大,但线性度需特殊校准
需要特别注意:360度舵机分为两种完全不同的类型:
澄清常见误解:当购买标注有“360度舵机”之时,要确认到底是“连续旋转型”(不存在角度反馈)、还是“多圈绝对位置型”(存在角度反馈)。对于前者而言,其没办法控制具体的停止角度,仅仅能够控制转速以及方向。
实际角度范围:无限制(理论上可无限连续旋转)
控制方式:PWM脉宽决定速度和方向,不能控制目标角度
具有体现典型特征的参数为,空载时的运转速度属于五十至一百转每分钟的范围之内,而扭矩这一数值是由电机以及减速比共同决定的。
适用场景:机器人底盘轮子、绞盘、卷扬机构
角度所涵盖的范围是,360度乘以N圈,其中N一般存在多种可供选择的情况,分别是3圈、5圈、10圈以及50圈。
采取的控制方式有,RS485,还有TTL,或者CAN总线,要发送的是目标圈数,再加上角度值。
精准程度为,每一圈存在4096到16384个脉冲,其对应的角度范围是0.088度至0.022度。
典型产品参数:50圈型号可旋转18000度(50×360)
有一部分工业执行器呢,它会借助丝杠把旋转的动作转变为直线的动作,而角度的范围实际上是对应着直线行程情形的,比如说:
旋转角度:0~1800度(5圈)
直线输出:0~200mm
控制方式:位置闭环,角度与直线距离成线性关系
当你手上持有一台舵机,然而却并不明晰其角度范围之际,能够经由以下三种办法进行准确地判断:
符合规范的舵机的数据表里头必定会标明 “Angle Range” 或者 “ Angle”。常见的表述示例为:
“ Angle: 0° to 180°”
“Max angle: 270°±10°”
“360° ”
使用单片机或舵机测试仪输出以下脉宽序列,观察舵机动作:
1. 输出 500μs 脉宽:记录停止位置为起点
2. 输出 2500μs 脉宽:记录停止位置为终点
3. 如果两点间差距对应物理角度为180度,则为标准180度舵机
4. 若是脉宽超过2500μs之后,后舵机仍旧转动,那就试着用3500μs、4500μs,一直到不再有变化为止。
5. 最大脉宽对应的角度即为该舵机的极限范围
需要留意的事项:进行测试的时候,一定要先去确认舵机供电的电压以及信号的电平是相互兼容的,防止出现被烧毁的情况。
打开舵机外壳(注意保存好齿轮)
观察输出轴底部或末级齿轮上的机械限位凸起
若限位结构限制旋转在180度以内,则为标准有限位舵机
若无任何限位且齿轮可自由旋转,则为连续旋转舵机
哪怕舵机标记的标称角度是180度,下述这些因素会致使实际能够使用的角度比标称的数值要更小。
根据你的实际需求,按以下流程选择舵机角度范围:
第一步:确认运动类型

要是非得精准地停留在某一个角度,那就去挑选那种带有有限制角度功能的舵机,比如角度为九十度、一百二十度、一百八十度或者二百七十度的这类舵机。
需要连续旋转驱动轮子? → 选择连续旋转舵机
需要旋转多圈并定位? → 选择多圈绝对角度舵机
第二步:计算所需最大角度
假使机械臂肩关节要从负九十度摆动至正九十度,那么总行程为一百八十度,选择一百八十度或者二百七十度的舵机,且要保留余量。
第三步:考虑控制精度
角度的范围越大,那么相同的PWM脉宽变化所对应的角度增量就越大伟创动力,而绝对精度则越低。示例:
90度舵机:1μs脉宽变化 ≈ 0.09度
180度舵机:1μs脉宽变化 ≈ 0.18度
270度舵机:1μs脉宽变化 ≈ 0.27度
第四步:验证电源和机械尺寸
采用固定角速度的情况下,大角度舵机完成动作一般所需时间更长,要保证你的控制系统能够等待到位信号。
Q1:舵机转动角度达不到标称值怎么办?
第一需查看控制信号的脉宽范围是不是全然匹配(像500至2500微秒那般),接着运用舵机测试仪独自测试以排除程序方面的问题,要是依旧不行,有可能是机械出现卡滞或者电压不够,把负载降低之后再去尝试。
Q2:能否通过修改程序让180度舵机转360度?
不能,由于180度相关舵机内部存在机械限位情况,要是强行进行驱动的话,就会致使齿轮出现打齿现象或者电机被烧毁,所以购买专门的没有限制或者是多圈的舵机。
Q3:为什么有的舵机标称“0180度”但实际只能转160度?
针对A所提及的,属于常见公差范畴的问题,即低价舵机存在着允许正负10度机械误差的情况,其为,在购买时挑选标注“全行程无死角”这类型号的,或者于软件里再次标定实际脉宽所对应的角度。
Q4:连续旋转舵机能当普通舵机用吗?
A:那是绝对不行的。舵机要是连续旋转的话,就不存在角度反馈了,也就没办法停在指定的角度位置,单单可以被用来驱动轮子、安装螺旋桨等这类场景。
Q5:如何实现超过360度的多圈精确定位?
,A要求,得使用那种多圈绝对编码器舵机,这种舵机一般是带有磁编码器或者电位器再加上齿轮组的,然后呢,要借助CAN或者RS485总线去发送圈数以及角度指令,就比如说指令是“旋转3圈再加上90度”。
舵机转动角度全然取决于具体型号,最为普遍的答案是0至180度,然而90度、120度、270度、连续旋转以及多圈旋转同样是多见的。在进行选型或者使用之际,请要遵循以下行动建议:
1. 进行查阅规格书这个行为,不要凭借经验去进行猜测推断,要去确认“Angle Range”这一参数。
2. 区分类型:有限位、连续旋转、多圈定位三类,不可混用
3. 测试验证:使用舵机测试仪或PWM脉宽扫描法实测实际行程
4. 预留余量:机械设计中保留±10度的安全边界,避免撞击限位
5. 寻觅匹配控制信号,要保证你所操控的控制器输出的最为微小/最为庞大的脉宽,跟舵机所需求的情形保持一致。
在绝大多数的塑造、机器人自主制作以及电子竞赛类项目当中,挑选那种角度范围处于0至180度范畴内、具备充足扭矩且配备金属齿轮的标准舵机,乃是最为妥当保险的起始点。要是有持续旋转的需求,那么就要单独去购置连续旋转舵机,千万不要尝试去整修改造标准舵机了。























