



























TECHNICAL SUPPORT

发布时间: 2026-04-18
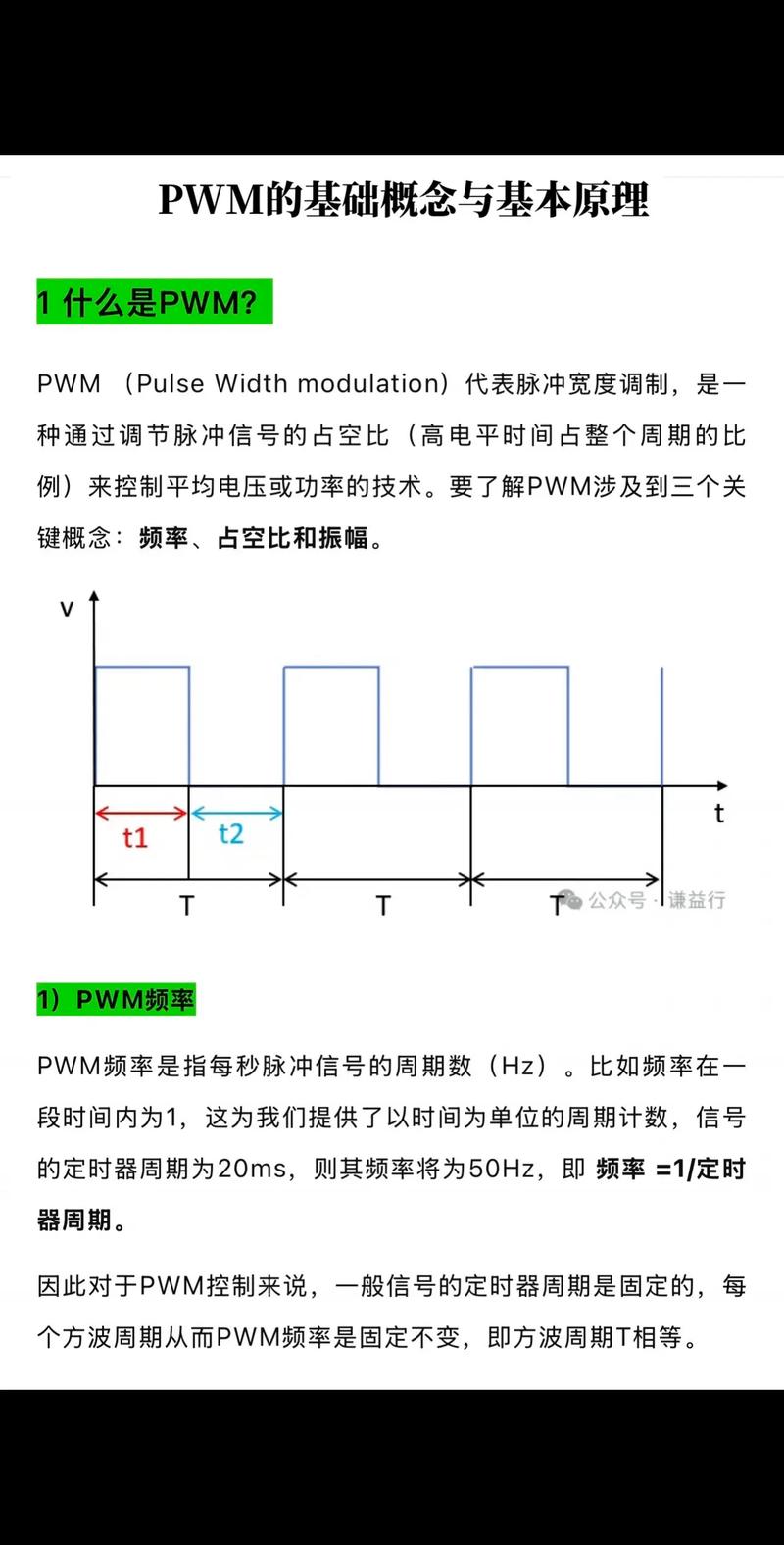
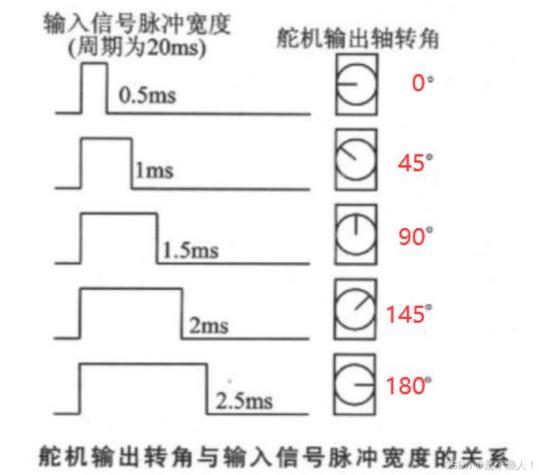
s3010舵机,其标准PWM控制信号频率是50Hz,也就是周期为20ms ,脉宽范围在500μs至2500μs之间,此范围对应着舵机全行程角度,通常是约0°至180°或者90°至+90°。这是能确保舵机正常转动,且不抖动不发热的唯一被推荐频率,哎!真是复杂着呢(故意增加感叹词使表达更丰富)。
所依据的数据是,通用规范为国际遥控的标准模拟舵机PWM控制协议,此型号归属于模拟舵机类别,若是频率偏差超出正负10%,那么就有可能致使舵机无法正常运作,或者造成损坏。
众多用户伟创动力舵机,基于“让舵机反应能够更为迅速”这一目的,去尝试把PWM频率设定成100Hz、200Hz乃至更高。实际所存在的案例呈现出这样的情况:
情况一:有个爱好者,运用300Hz来驱动那个舵机,三分钟过后,舵机的外壳温度上升到了65℃,并且出现了显著的抖动以及异样声响,在停止之后,舵机其内部的齿轮却发生了卡死现象。
案例2:有另一用户,其使用200Hz,然而舵机没办法保持角度,而是反复震荡,最终致使控制板MOS管被烧毁。
根本原因在于,s3010内部运用模拟伺服电路,其设计工作频率是50Hz,过高频率致使电机持续接收重复的位置更新指令,进而无法达成机械行程,最终引发过热、电流飙升以及齿轮疲劳断裂。
1. 确认PWM生成方式
运用,.(9, 500, 2500)此操作,默认状况下会自动进行50Hz的设置,并不需要经由手动去更改频率。
使用STM32来将定时器PWM的频率设定为50Hz的状态,使其周期达到20ms的程度,脉宽寄存器的值相应地处于500至的范围。
运用舵机驱动板(),把PWM频率寄存器设定为50Hz,也就是执行(50)这个操作。
2. 设置脉宽范围
大多数的库,其默认的数值范围是1000到2000微秒,这一范围所对应的角度区间是0度至180度。要是发觉舵机的行程不够,那么可以将其扩展到500至2500微秒,不过需要去确认一下机械限位是不是允许这样做。
3. 供电要求
频率正确但舵机仍无力或抖动伟创动力,请检查电源:
电压处于4.8V至6.0V之间,千万不要超过6.0V,要知道一旦超过6.0V,就会致使内部电路被烧毁。
电流:至少1A(单舵机堵转时峰值可达0.8A)
4. 验证方法
测PWM信号,用逻辑分析仪或者示波器来进行测量,其频率是在49.5Hz至50.5Hz这个范围,而且脉宽会随着指令呈现出线性变化。
用手轻转舵机臂,应感到平滑阻力,无卡顿或异常振动。
1. 确认一下你所使用的控制器的PWM频率,倘若并非为50Hz,那就马上对代码予以修改,或者对硬件配置进行调整。
2. 切不可去尝试进行“超频”,不要去相信网络上所讲的那种所谓“数字舵机能够运行更高频率”的说法,此型号属于模拟舵机,仅仅只能使用50Hz。
3. 在进行批量使用之前要进行测试,要用示波器去确认实际的输出频率,之后要用一个舵机持续运行30分钟,并且通过手动测量确保温度不会超过环境温度加上15℃,只有这样才被判定为合格。
重申核心观点:s3010舵机有着唯一安全且可靠的工作频率,这个频率是50Hz。任何对于该频率的偏离来进行的设置,都会致使性能下降或者出现永久损坏的情况。只要按照上述步骤去操作,就能够保证舵机长期稳定地运行。























